Digital Geometry Processing
Exercise8-Smoothing
Computer Graphics Group
Mesh Smoothing
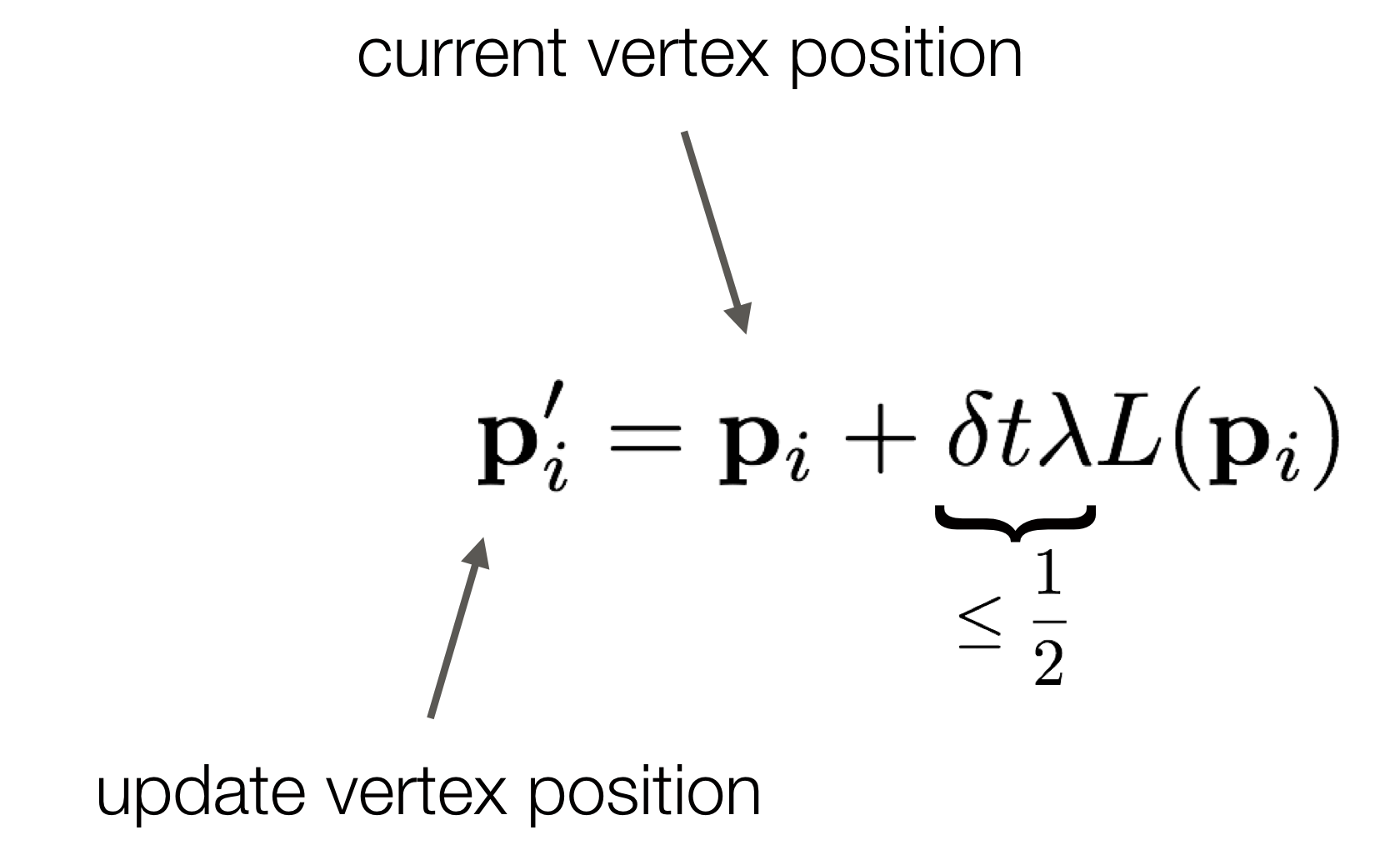
Explicit Smoothing
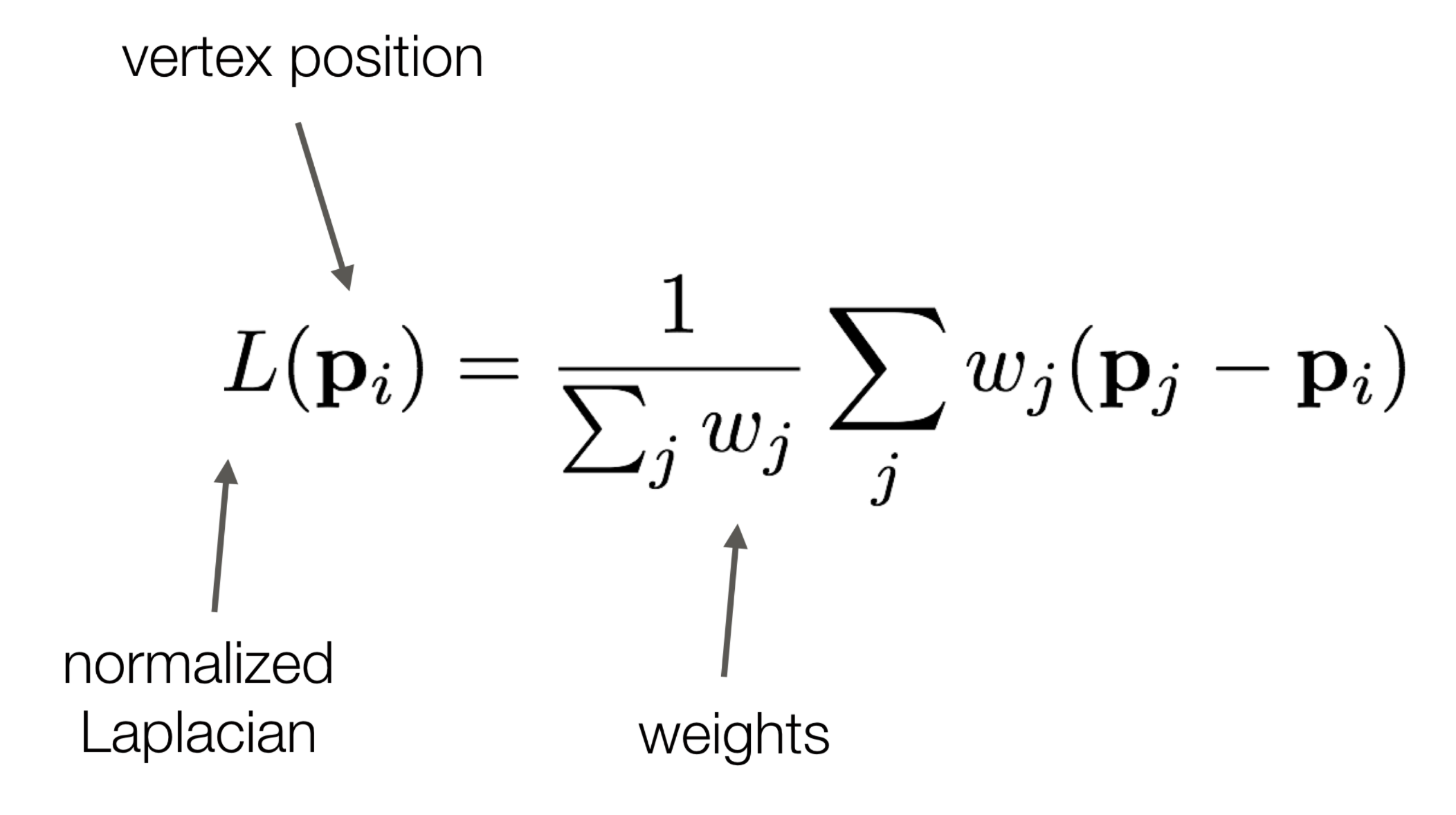
Explicit Smoothing
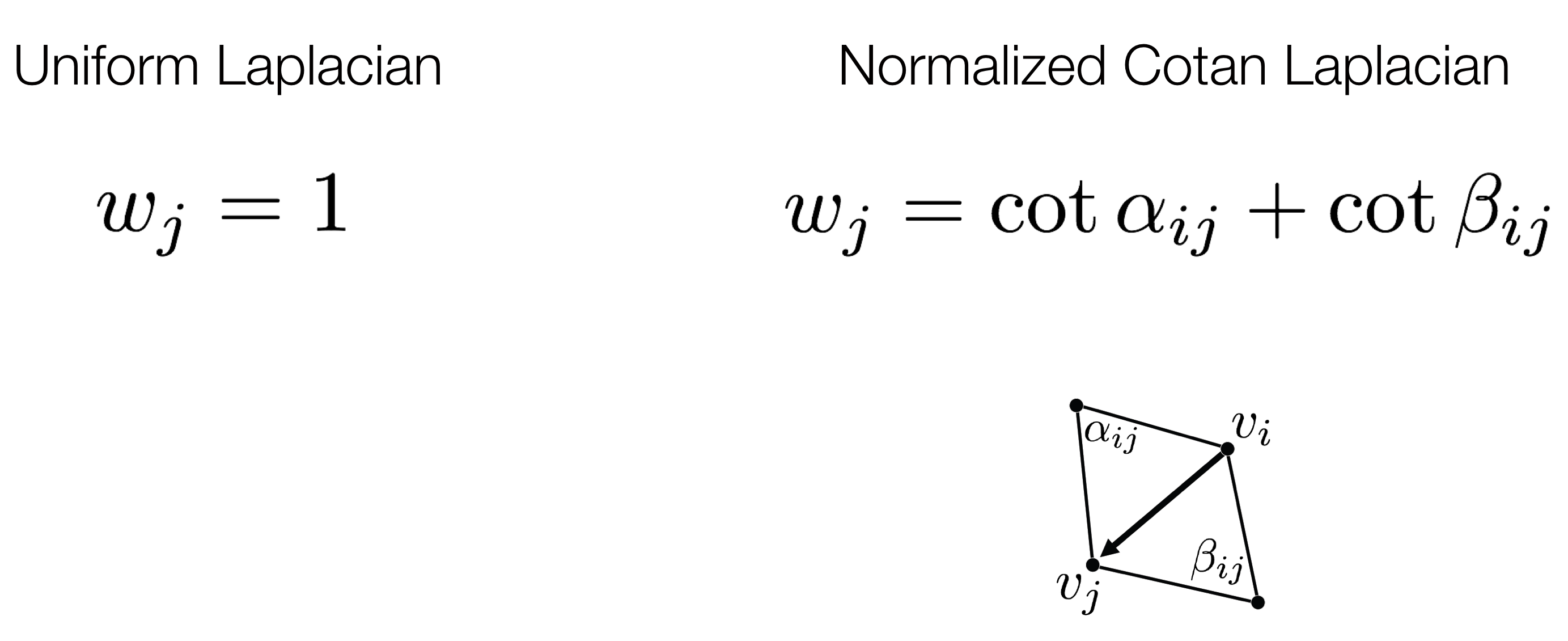
Explicit Smoothing
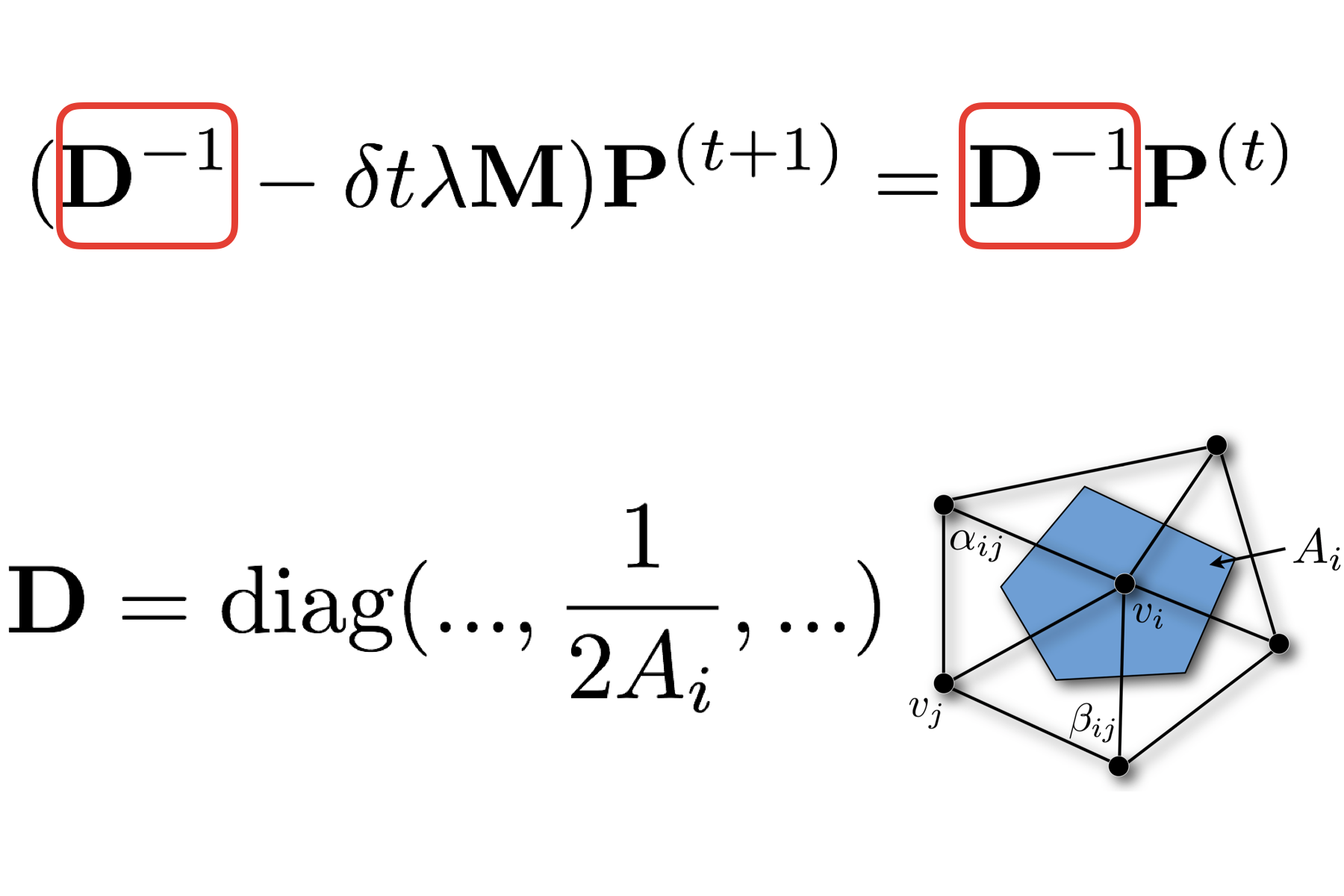
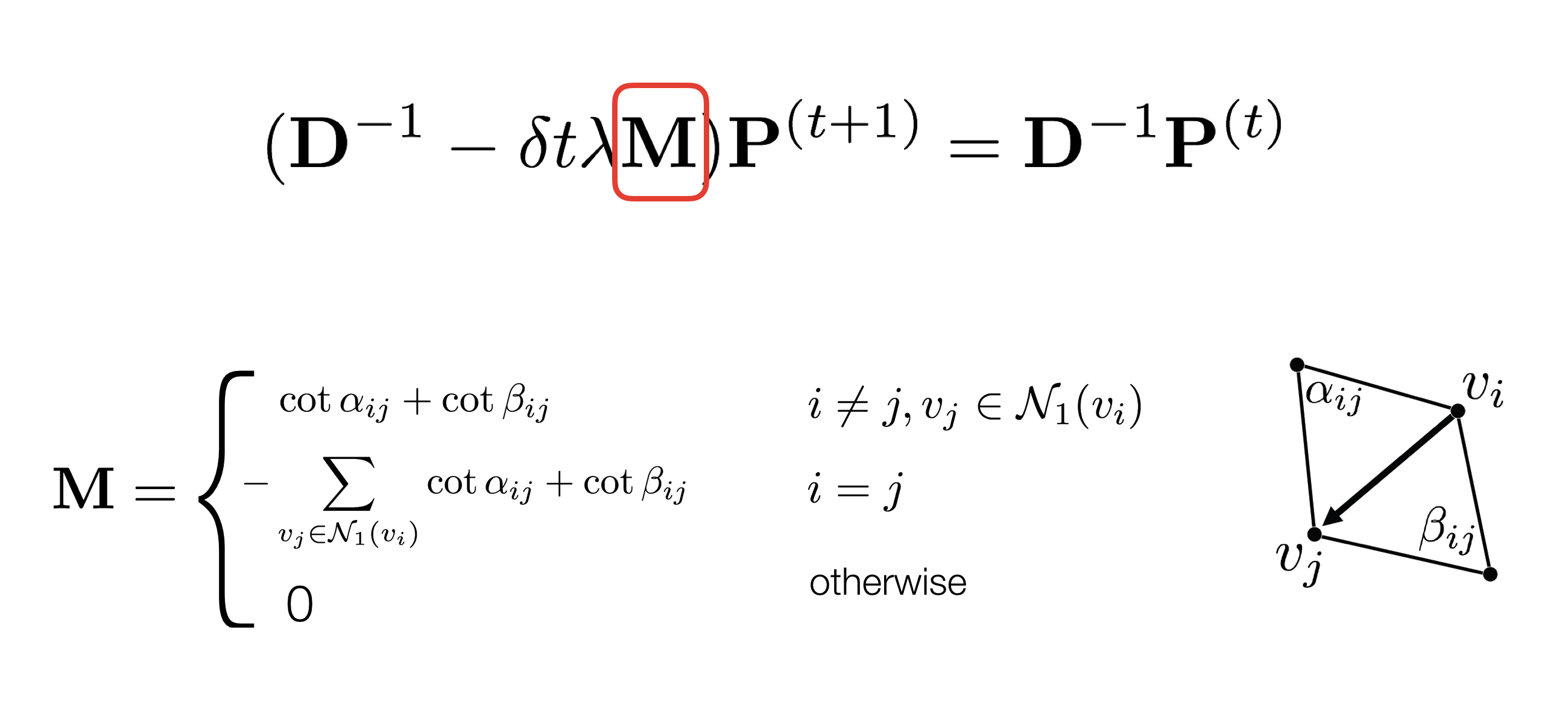
Implicit Smoothing
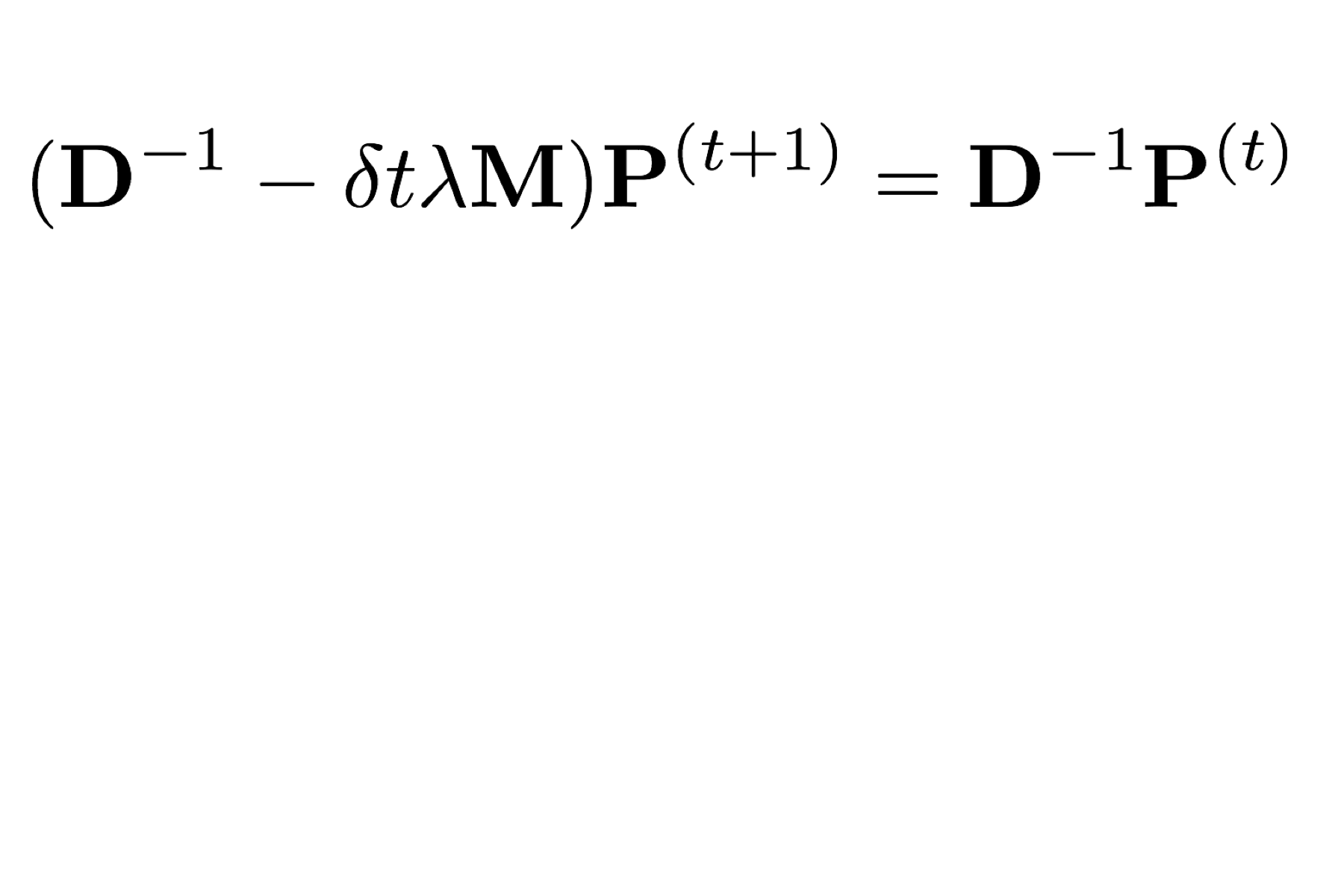
Implicit Smoothing
Implicit Smoothing
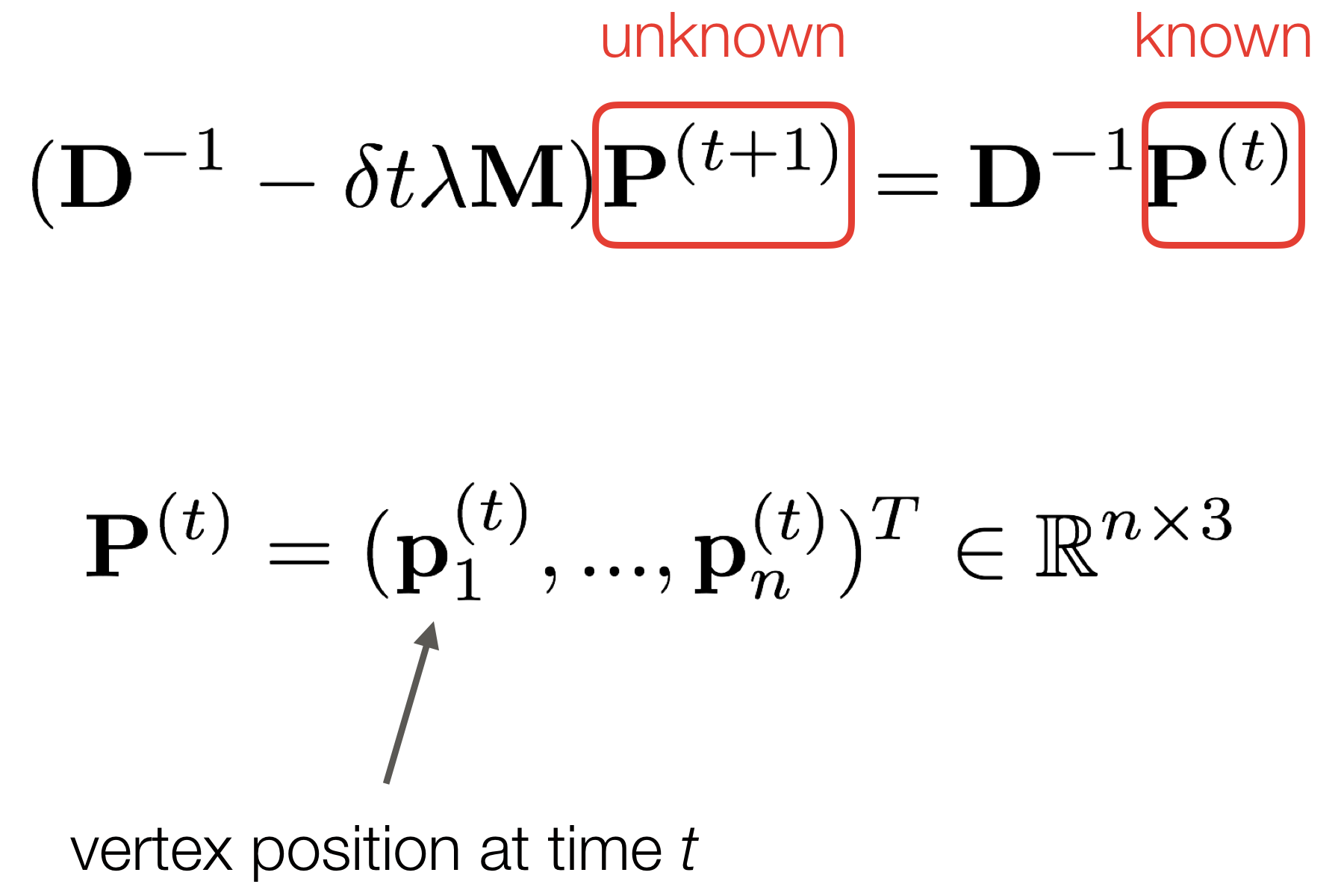
Implicit Smoothing
Implicit Smoothing
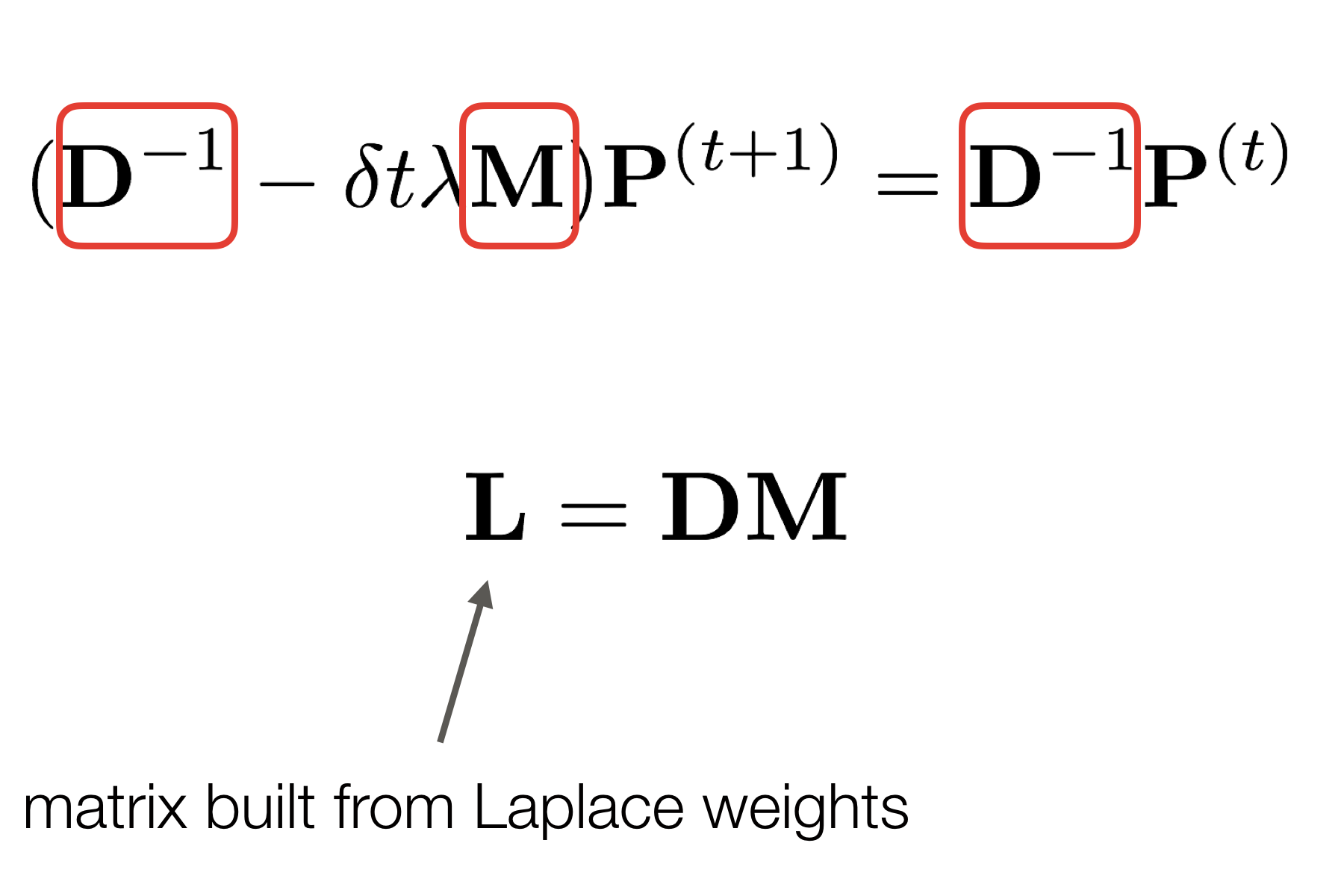
Implicit Smoothing
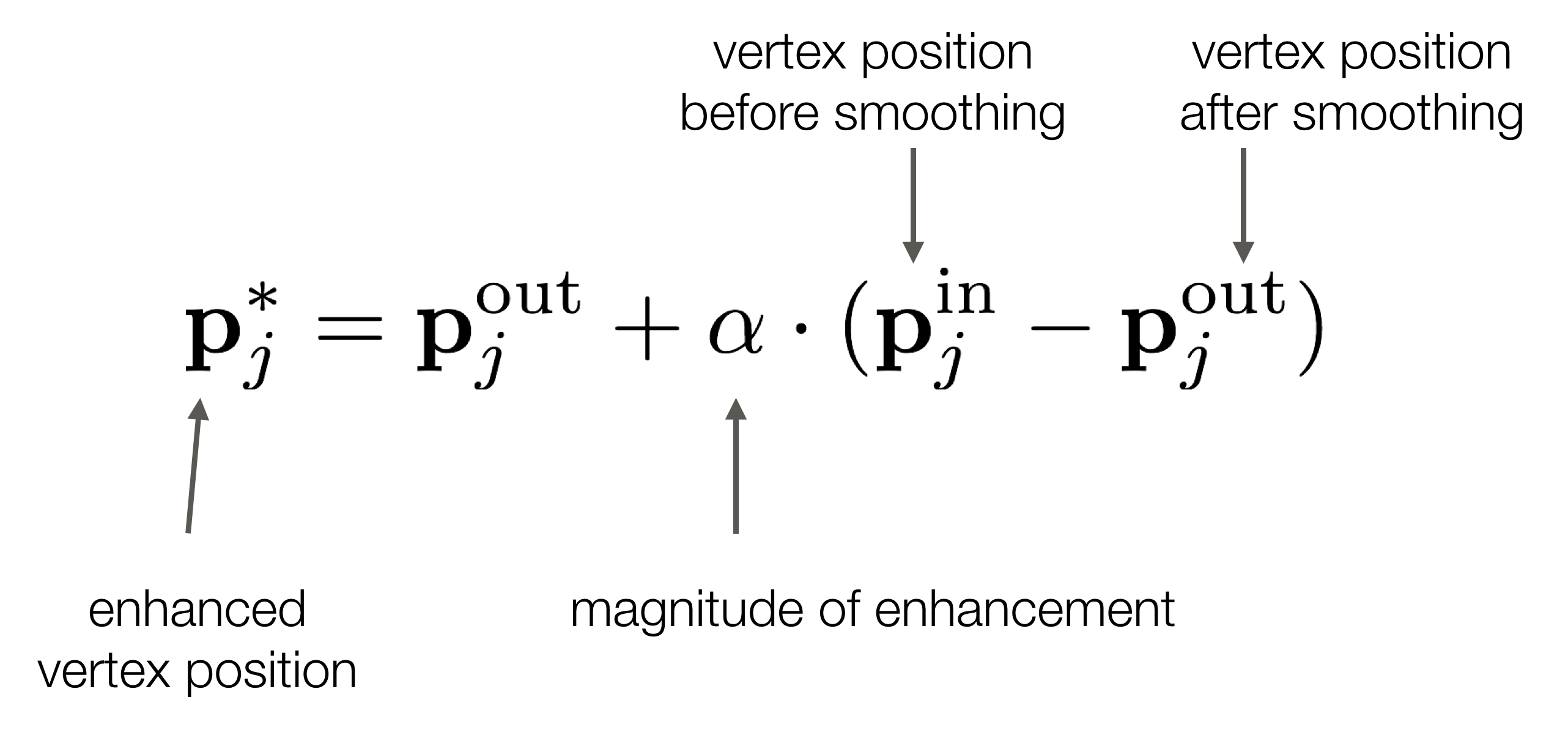
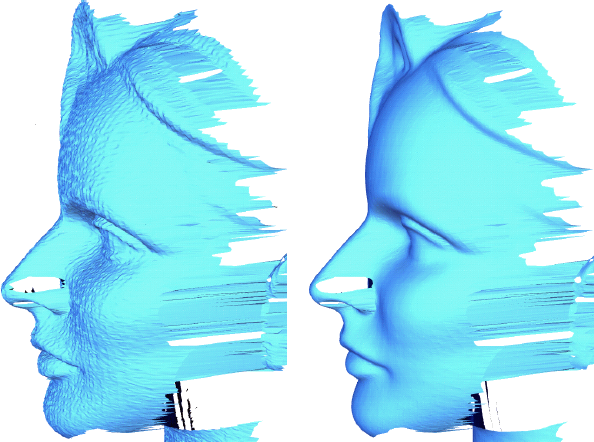
Feature Enhancement
Feature Enhancement
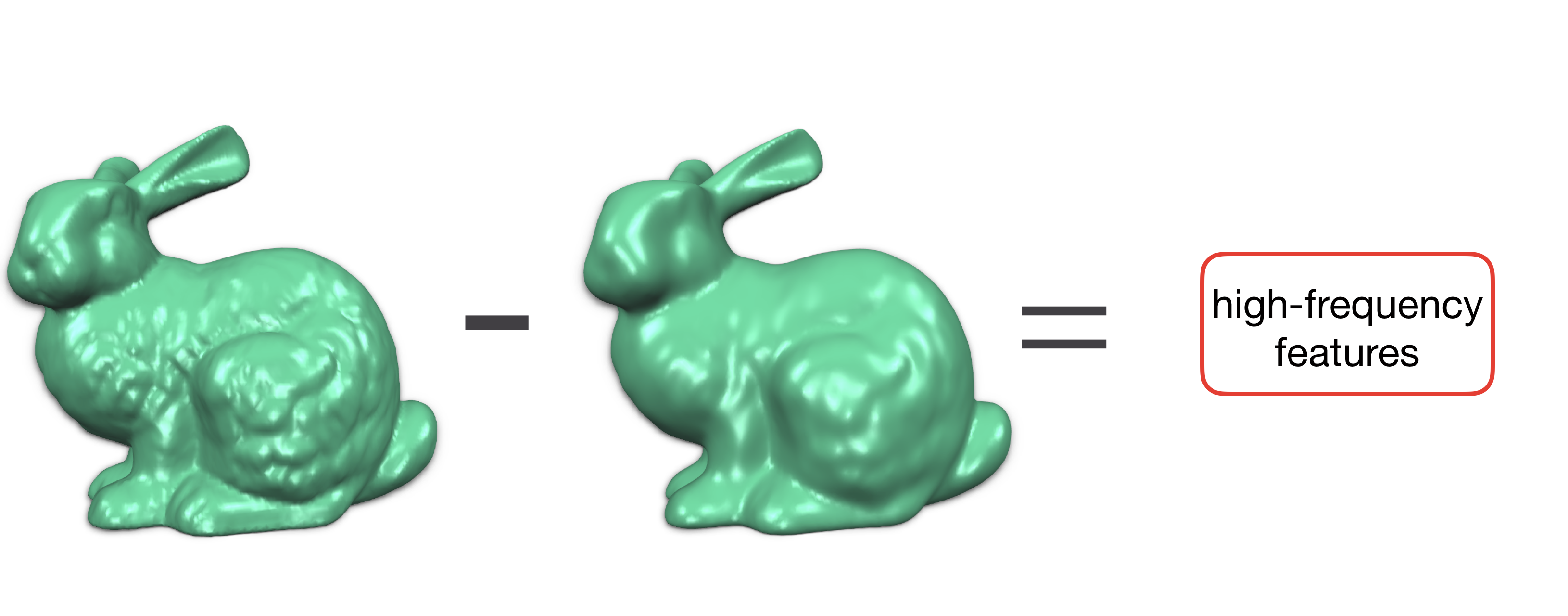
Feature Enhancement

Feature Enhancement