Last week: Voronoi Diagram
- Given a set of 2D sample points \(\{\mathbf{p}_1, \ldots , \mathbf{p}_n\}\)
- Partition the plane by assigning each 2D point \(\mathbf{x}\) to its nearest sample.
- All points assigned to \(\mathbf{p}_i\) form its Voronoi cell \[\mathcal{V}(\mathbf{p}_i) = \left\{ \mathbf{x} \in \mathbb{R}^2 : ||\mathbf{x}-\mathbf{p}_i|| \leq ||\mathbf{x}-\mathbf{p}_j|| \quad \forall j \neq i \right\}\]
- Edges and vertices of these cells form the Voronoi diagram (VD).

Last week: Delaunay Triangulation
- The dual graph of the Voronoi diagram is a planar straight line graph, the Delaunay triangulation (DT)
- DT maximizes the minimum angle

- Circumcircles of DT triangles are empty
- DT triangles are duals of VD vertices
- Criterion can be used for DT construction

Last week: Delaunay Refinement

Last week: Centroidal Voronoi Diagrams

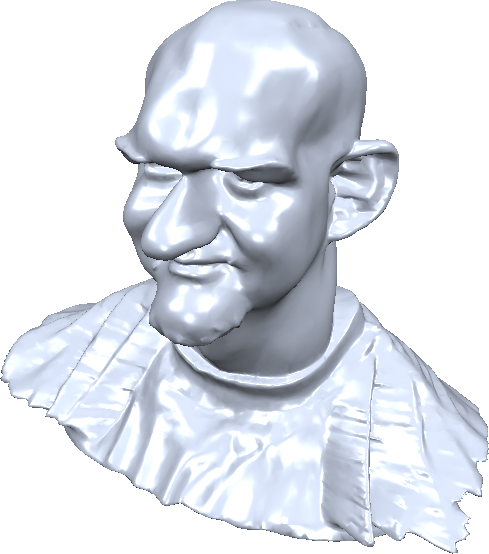
Motivation
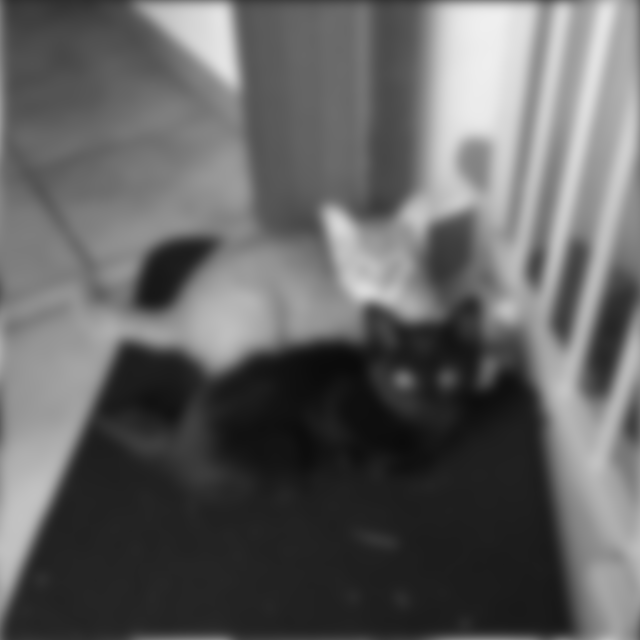
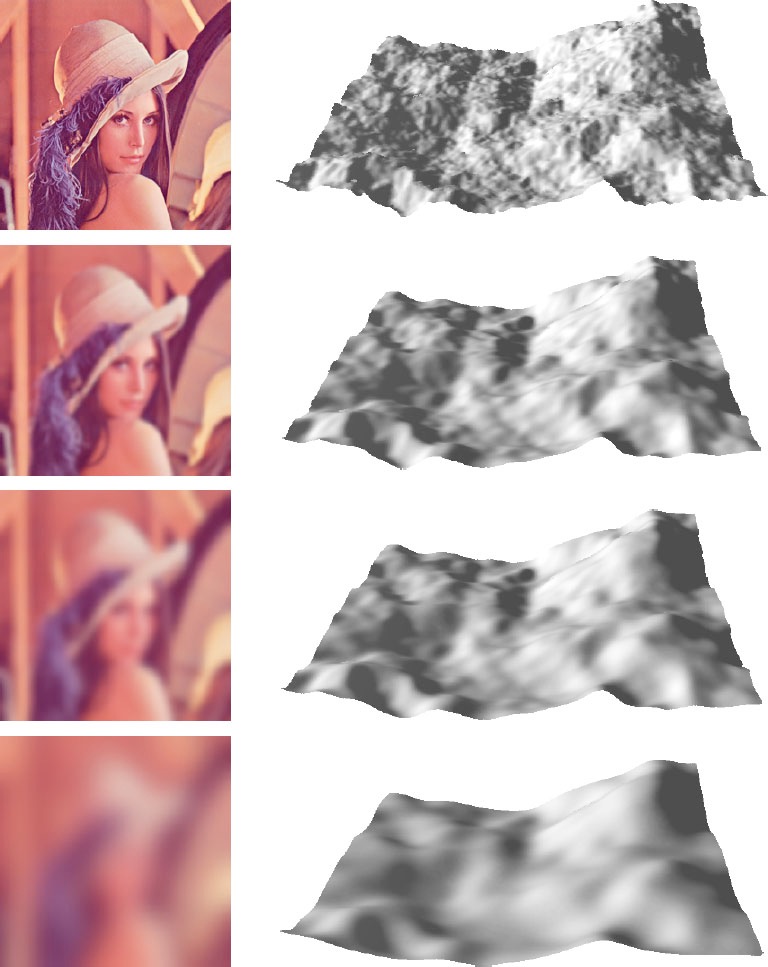
- Filter out high-frequency noise

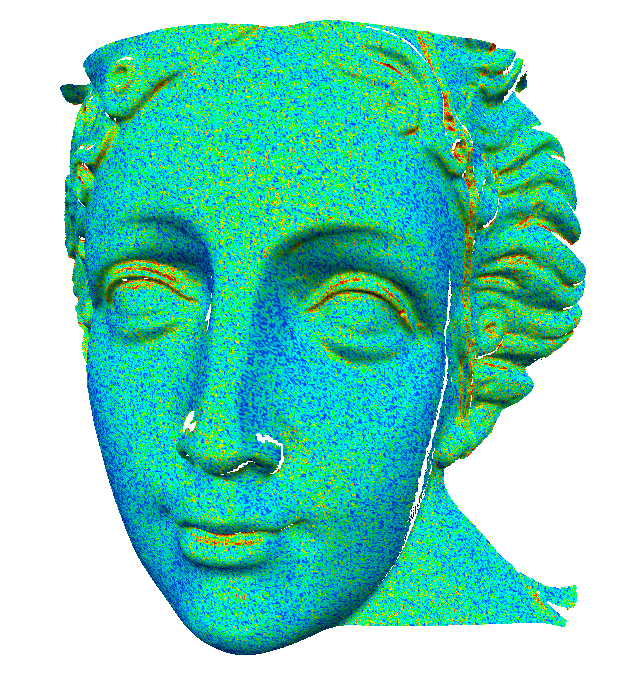


Motivation
- Filter out high-frequency noise
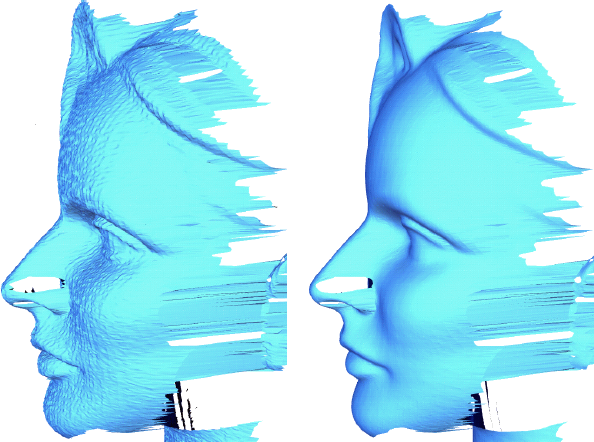
Motivation
- Advanced filtering
Fourier Transform
- Represent a function as a weighted sum of sine and cosine functions

(1768-1830)
![]()
\[ f\of{x} \;=\; a_0 + a_1 \cos\of{x} + a_2 \cos\of{3x} + a_3 \cos\of{5x} + a_4 \cos\of{7x} + \dots \]
Fourier Transform
\[F(\omega) = \int_{-\infty}^{\infty} f(x) \, \func{e}^{-2\pi\func{i}\omega x} \func{d}x\]
![]()
\[f(x) = \int_{-\infty}^{\infty} F(\omega) \, \func{e}^{2\pi\func{i}\omega x} \;\func{d}\omega\]
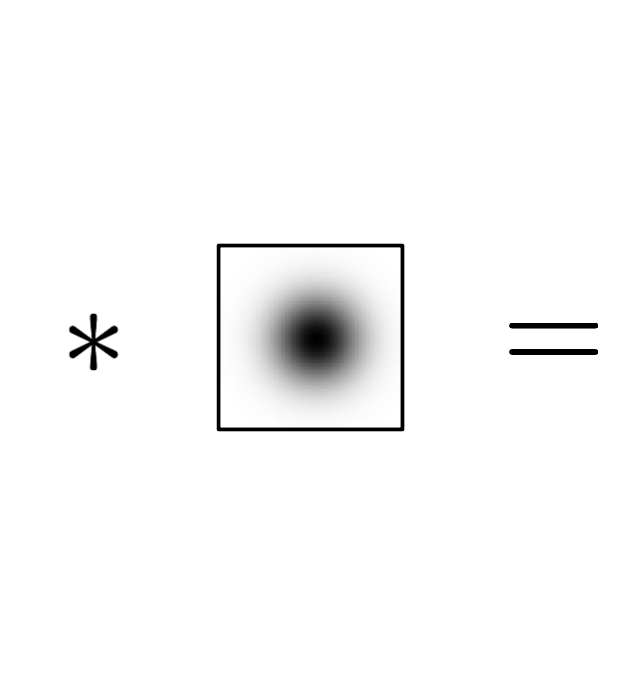
Convolution
Smooth signal by convolution with a kernel function \[ h(x) \;=\; f * g \;:=\; \int f(y) \cdot g(x-y) \,\func{d}y \]
Example: Gaussian blurring


Filtering with Fourier Transform
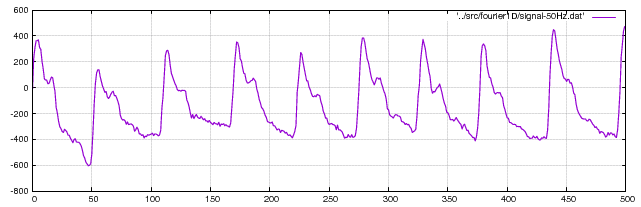
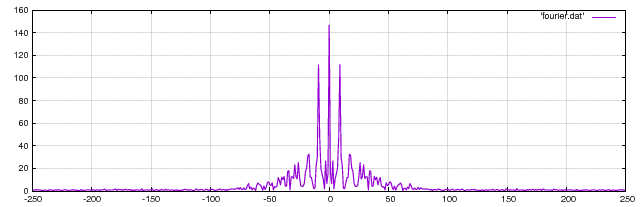
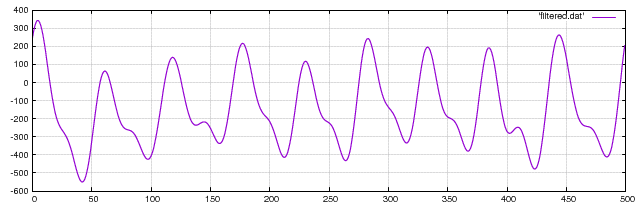
Filtering with Fourier Transform

Discrete Laplace-Beltrami
Function values sampled at mesh vertices \[\vec{f} = [f_1, f_2, \ldots, f_n] \in \R^n\]
Discrete Laplace-Beltrami (per vertex) \[ \laplace_{\set{S}} f\of{v_i} := \frac{1}{2A_i} \sum_{v_j \in \set{N}_1\of{v_i}} \left( \func{cot} \alpha_{ij} + \func{cot} \beta_{ij} \right) \left( f \of{v_j} - f \of{v_i} \right)\]
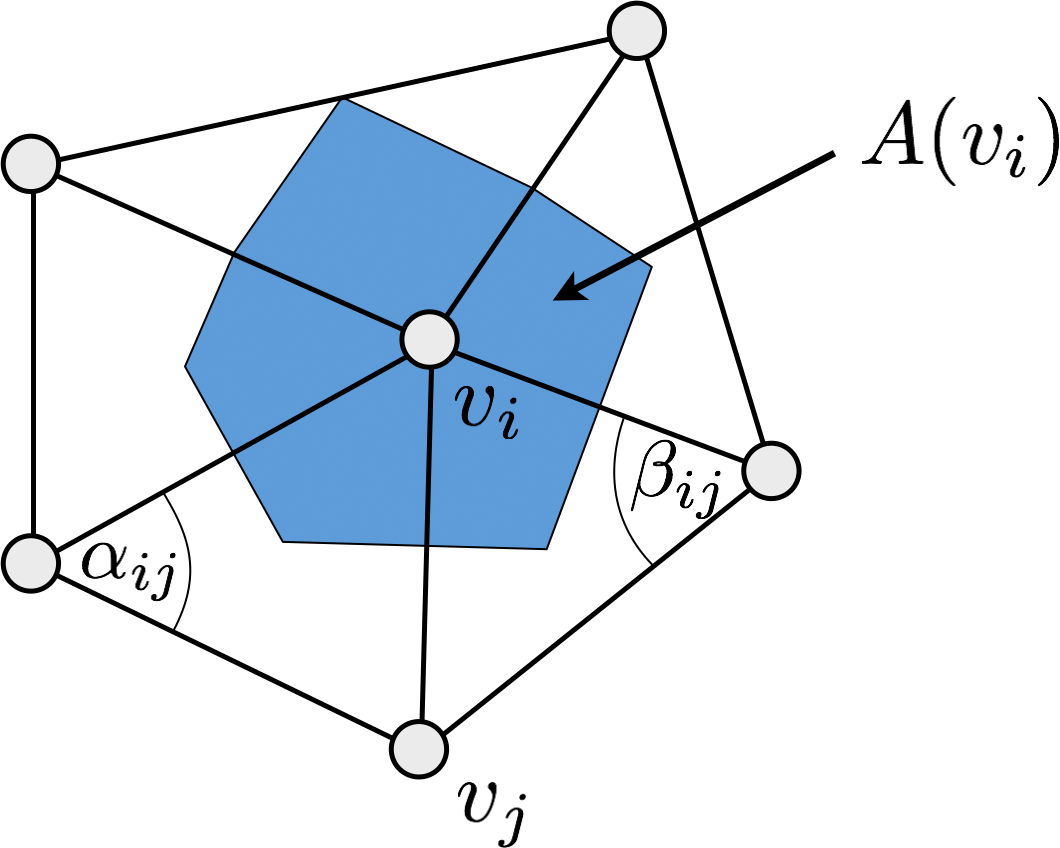
Discrete Laplace-Beltrami
- Discrete Laplace operator (per mesh)
- Sparse matrix \(\mat{L} = \mat{DM} \in \R^{n \times n}\)
\[ \mat{M}_{ij} \;=\; \begin{cases} \func{cot}\alpha_{ij} + \func{cot}\beta_{ij}, & i \ne j \,,\; j \in \set{N}_1\of{v_i} \\ - \sum_{v_j \in \set{N}_1 \of{v_i}}\of{ \func{cot}\alpha_{ij} + \func{cot}\beta_{ij} } & i=j \\ 0 & \text{otherwise} \end{cases} \]
\[\mat{D} = \func{diag}\of{ \dots, \frac{1}{2A_i}, \dots}\]
Spectral Mesh Analysis
- Discrete Laplace-Beltrami matrix \(\vec{L}\)
- Eigenvectors are “natural vibrations”
- Eigenvalues are “natural frequencies”

Levy, Zhang: Spectral Mesh Processing, SIGGRAPH Courses 2010
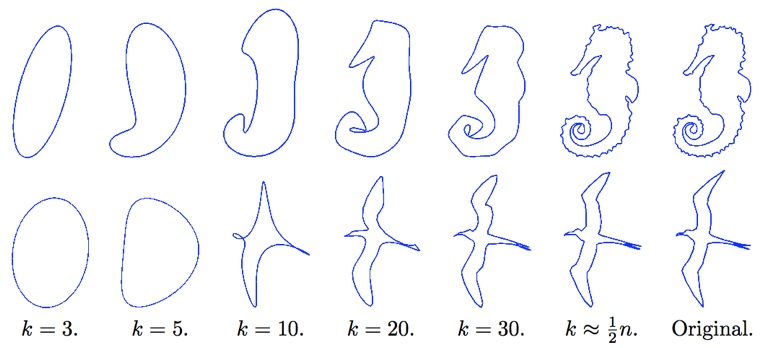
Spectral Mesh Analysis
- Setup Laplace-Beltrami matrix \(\vec{L}\)
- Compute \(k\) smallest eigenvectors \(\{\vec{e}_1, \ldots, \vec{e}_k\}\)
- Reconstruct mesh from those (component-wise)
Levy, Zhang: Spectral Mesh Processing, SIGGRAPH Courses 2010
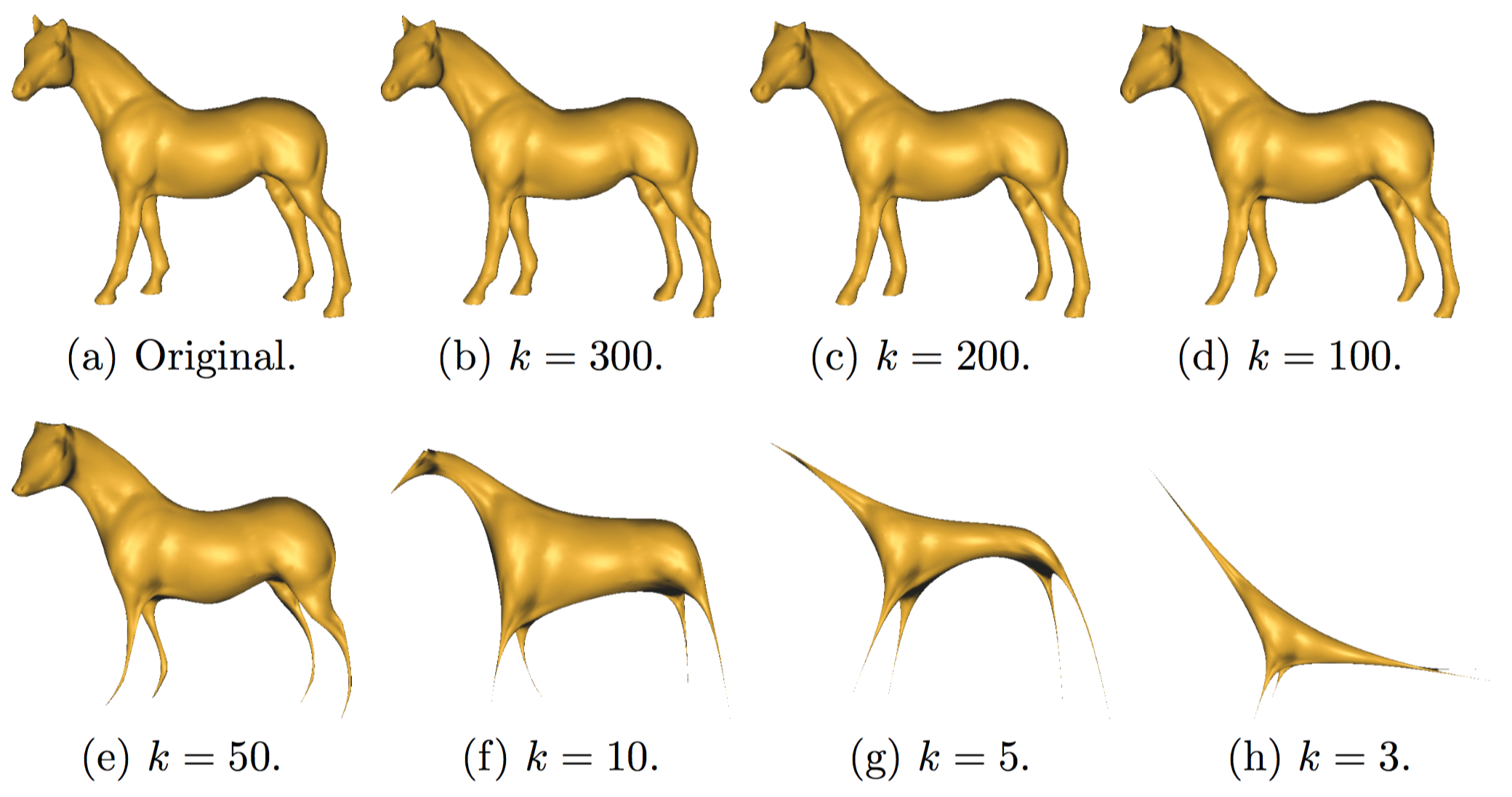
Spectral Mesh Analysis
- Setup Laplace-Beltrami matrix \(\vec{L}\)
- Compute \(k\) smallest eigenvectors \(\{\vec{e}_1, \ldots, \vec{e}_k\}\)
- Reconstruct mesh from those (component-wise)
Levy, Zhang: Spectral Mesh Processing, SIGGRAPH Courses 2010
Diffusion Flow
- Diffusion equation
\[\frac{\partial f}{\partial t} = \lambda \Delta f\]
- \(\lambda\) is the diffusion constant
- \(\Delta\) is the Laplace operator
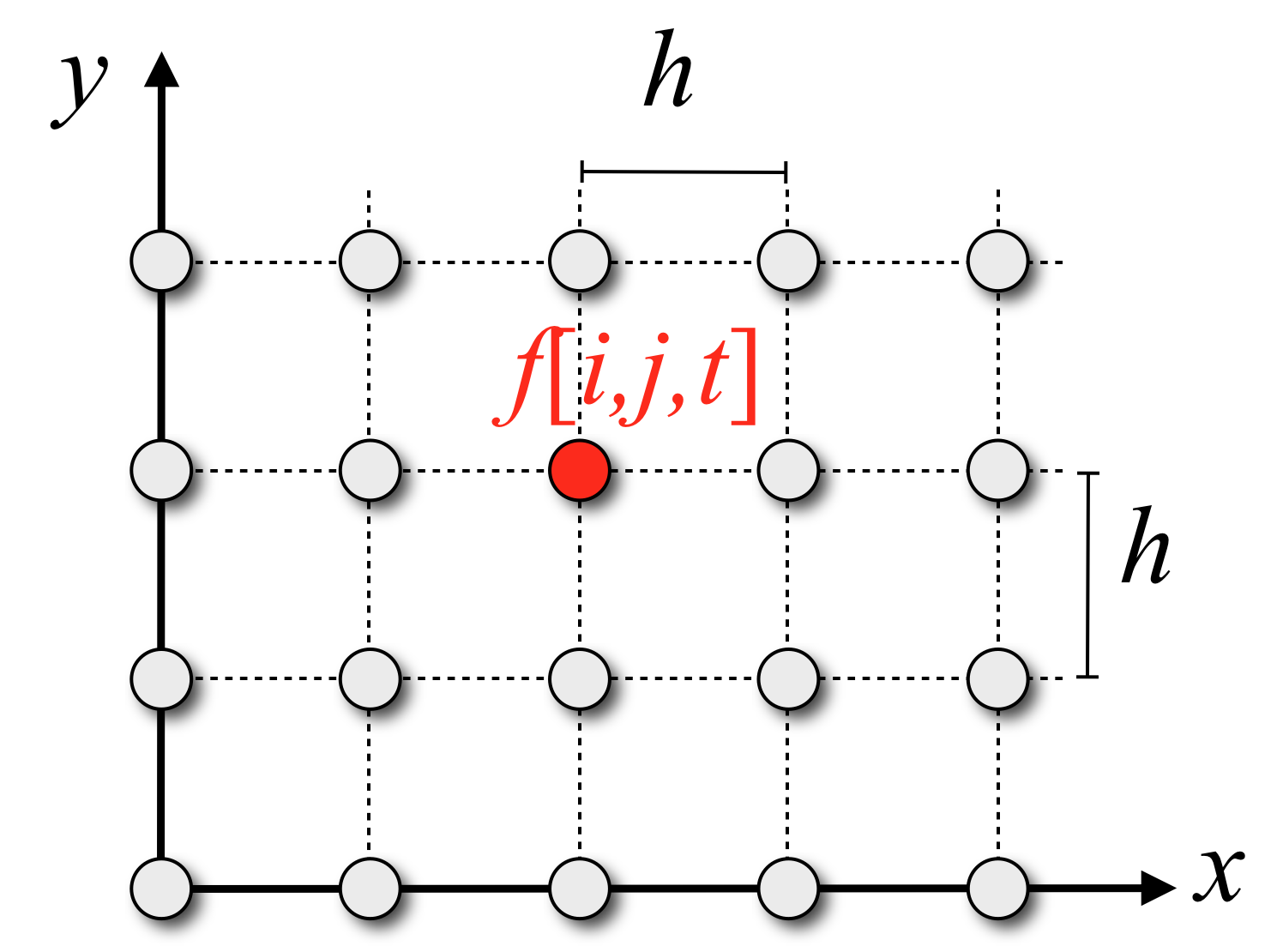
Discretize in Space & Time
- Sample function \(f(x,y,t)\) on a regular grid with grid spacing \(h\) and time step \(\delta_t\) \[f[i,j,t] \;=\; f\left(i \cdot h, j \cdot h, t \cdot \delta t \right) \] \[i=1, \dots, n \quad j=1, \dots, m \quad t=0, 1, 2, \dots\]
Finite Differences
- Approximate \(f(x+h)\) from Taylor series \[ \begin{align} f(x+h) &\;=\; f(x) + h f'(x) + \frac{h^2}{2!} f''(x) + \ldots \\ &\;\approx\; f(x) + h f’(x) \end{align}\]

(1685-1731)
- Approximate \(f'(x)\) as \[f'(x) \;\approx\; \frac{f(x+h) - f(x)}{h}\]
Finite Difference Method
- Approximation of temporal derivative
\[ f_{,t}[i,j,t] \;\approx\; \frac{f[i,j,t+1] - f[i,j,t]}{\delta t}\]
(1685-1731)
- Leads to explicit Euler integration
\[ f[i,j,t+1] \;\approx\; f[i,j,t] + \delta t \cdot f_{,t}[i,j,t]\]

(1707-1783)
Diffusion Flow on Meshes
- Continuous PDE: \(\frac{\partial \vec{p}}{\partial t} \;=\; \lambda \Delta \vec{p}\)
- Discretization: \(\vec{p}_i \leftarrow \vec{p}_i + \delta t \, \lambda \Delta \vec{p}_i\)
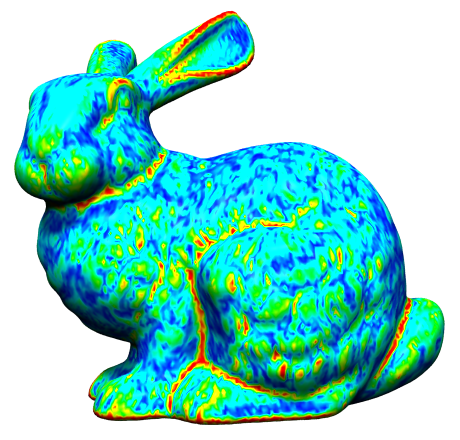
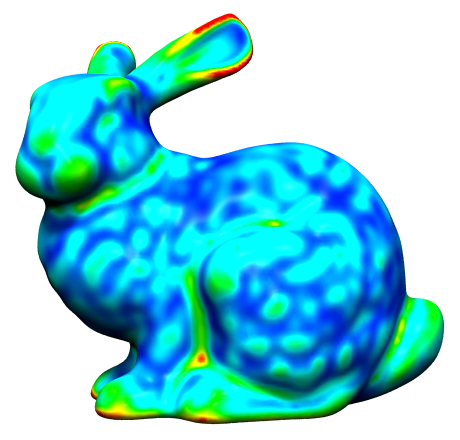
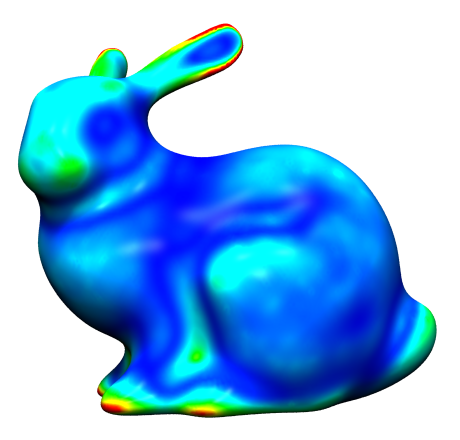
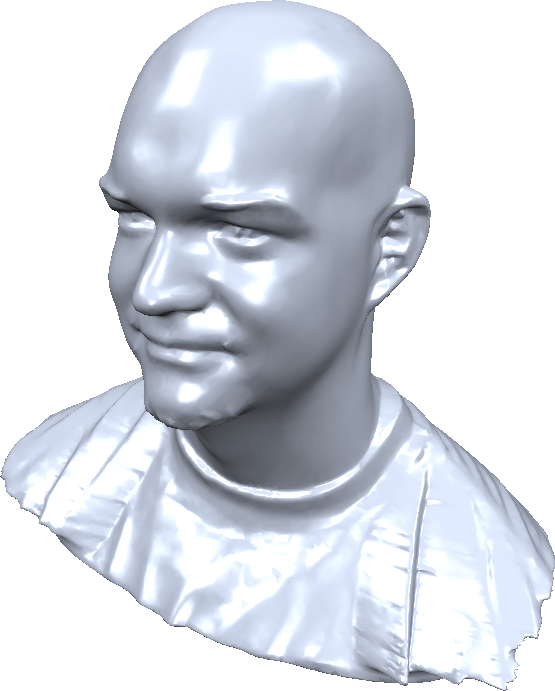
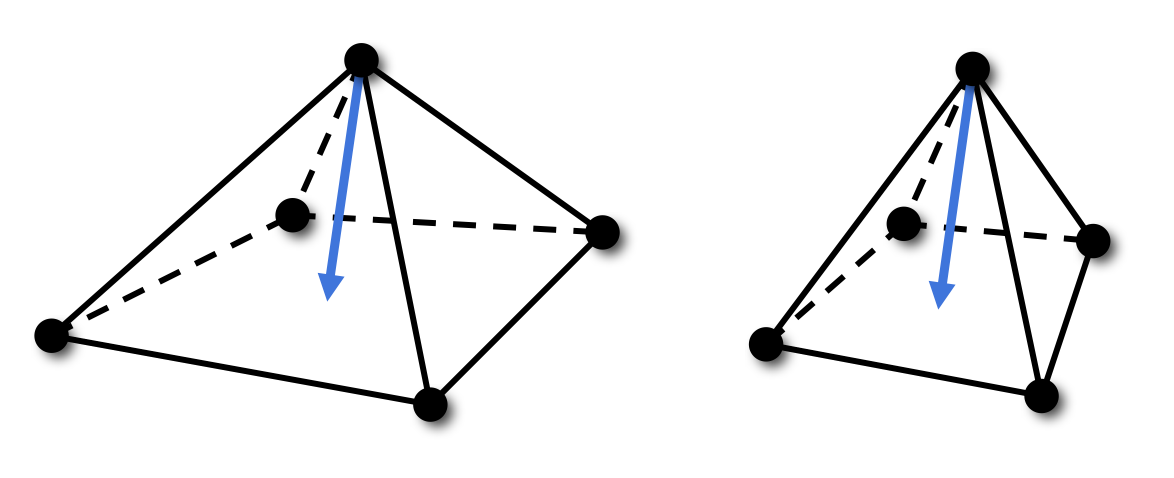
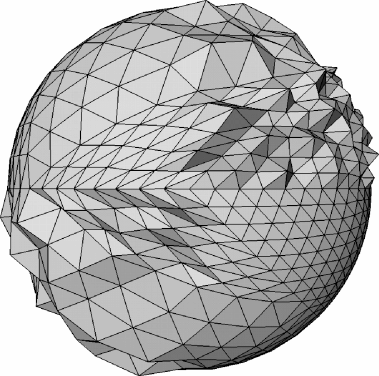
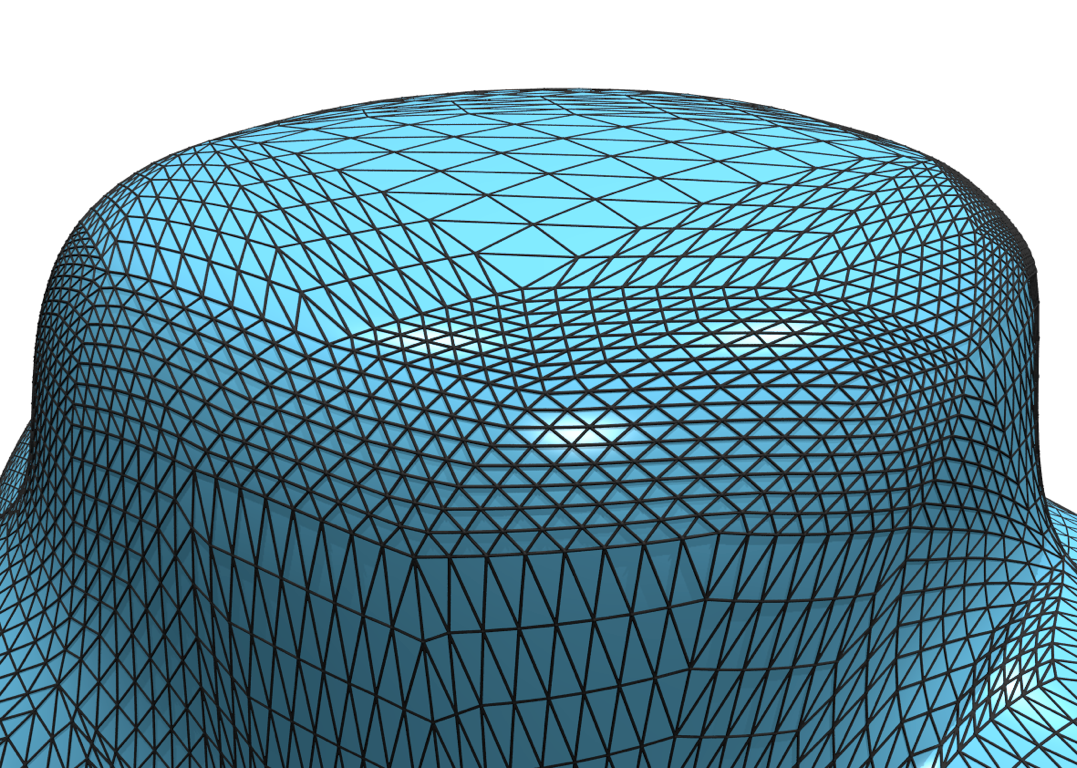
Uniform Laplace Discretization
- Smoothes geometry and triangulation
- Can be non-zero even for planar triangulations
- Vertex drift can lead to distortions
- Might be desired for mesh regularization
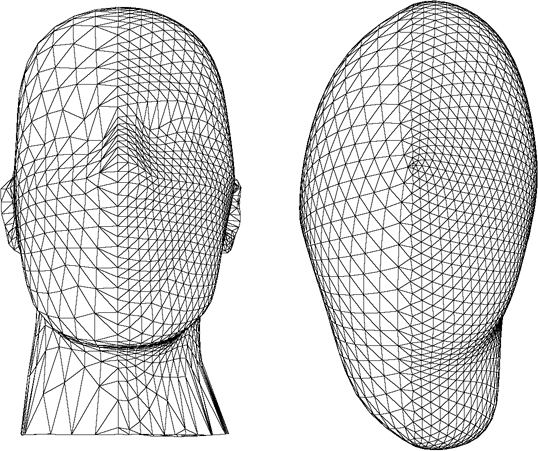
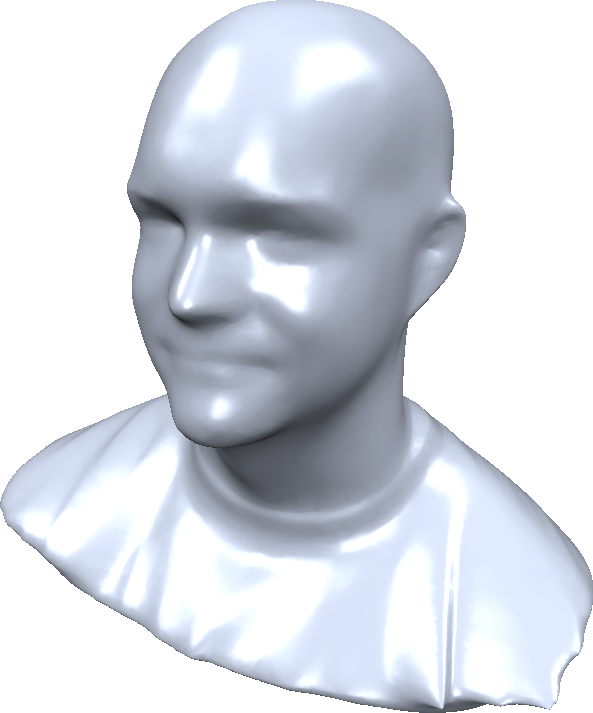
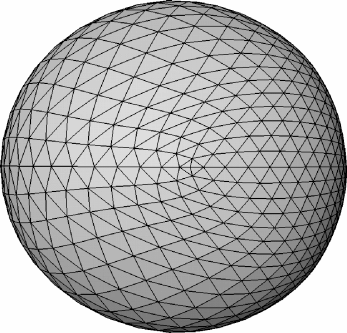
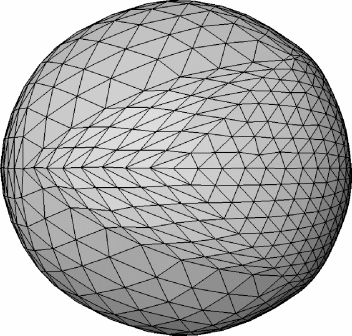
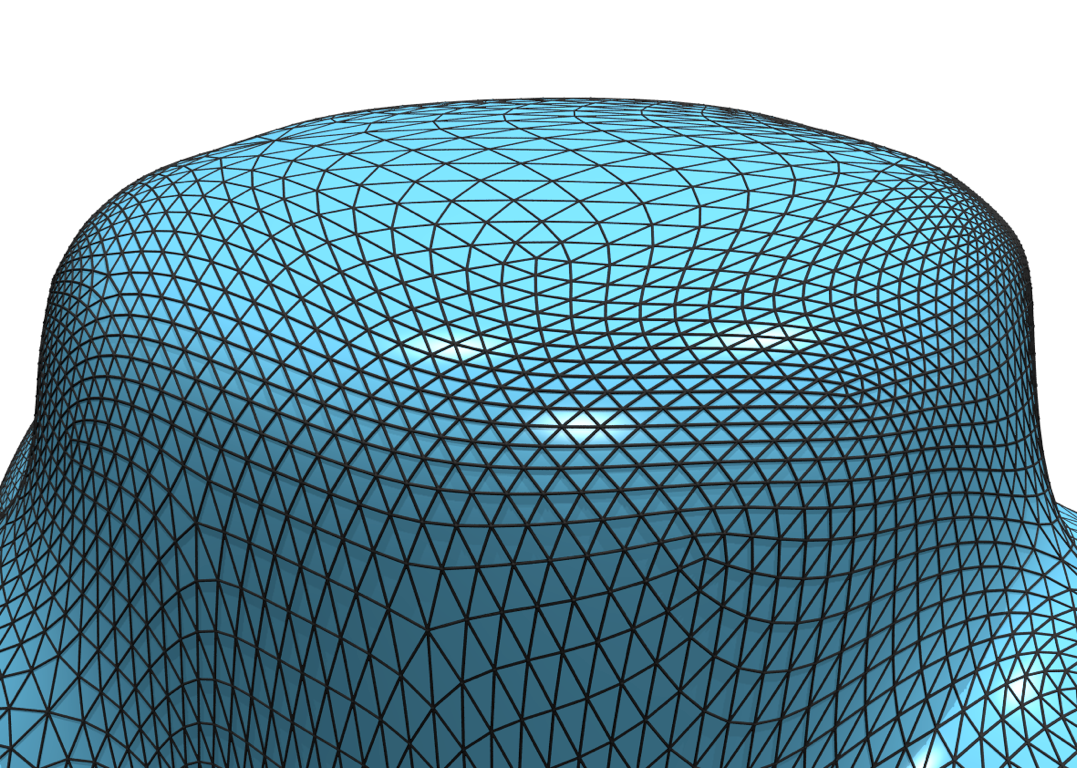
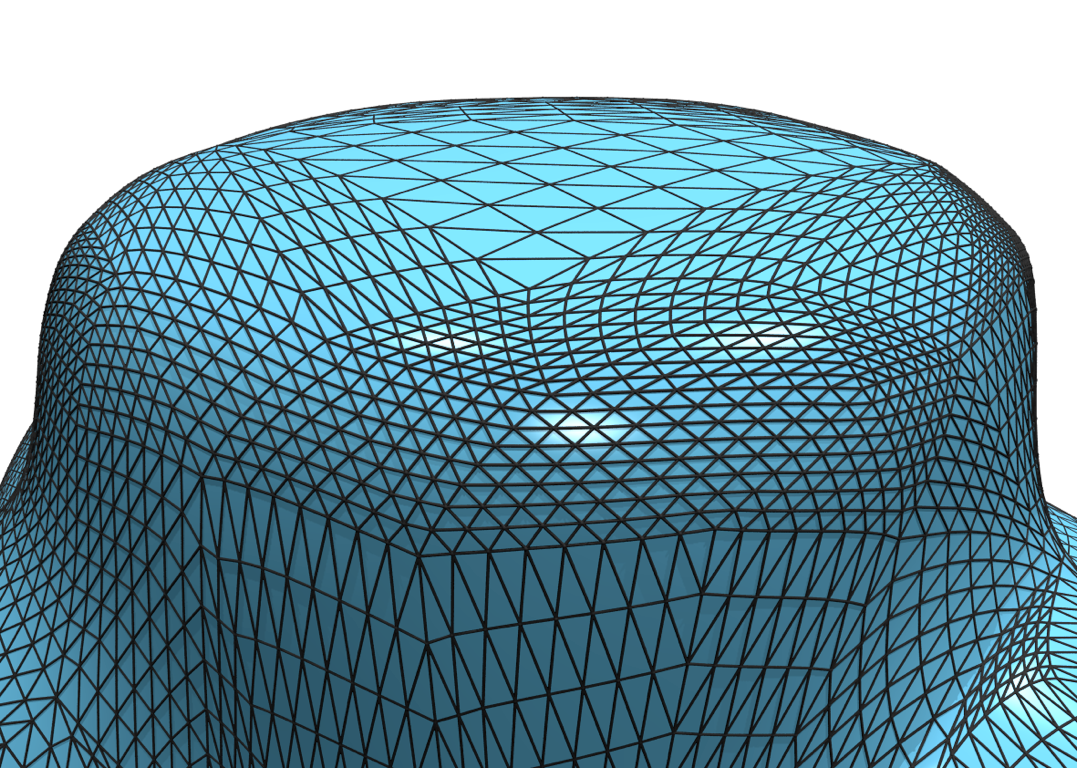
Uniform vs Cotan Discretization
How to solve the linear system?
- Solve linear system in each iteration \[(\vec{I} - \delta t \, \lambda \vec{L}) \vec{P}^{(t+1)} = \vec{P}^{(t)}\]
- Matrix \(\vec{L} = \vec{DM}\) is built from Laplace weights \[\mat{M}_{ij} \;=\; \begin{cases} \func{cot}\alpha_{ij} + \func{cot}\beta_{ij}, & i \ne j \,,\; j \in \set{N}_1\of{v_i} \\ - \sum_{v_j \in \set{N}_1 \of{v_i}}\of{ \func{cot}\alpha_{ij} + \func{cot}\beta_{ij} } & i=j \\ 0 & \text{otherwise} \end{cases} \]
\[\mat{D} = \func{diag}\of{ \dots, \frac{1}{2A_i}, \dots}\]
Literature
- Botsch et al., Polygon Mesh Processing, AK Peters, 2010
- Chapter 4

- Taubin, A Signal Processing Approach to Fair Surface Design, SIGGRAPH 1995
- Desbrun, Meyer, Schröder, Barr: Implicit Fairing of Irregular Meshes using Diffusion and Curvature Flow, SIGGRAPH 1999
Literature
- Botsch et al., Polygon Mesh Processing, AK Peters, 2010
- Chapter 4
- Taubin, A Signal Processing Approach to Fair Surface Design, SIGGRAPH 1995
- Desbrun, Meyer, Schröder, Barr: Implicit Fairing of Irregular Meshes using Diffusion and Curvature Flow, SIGGRAPH 1999