Last week: Poisson Surface Reconstruction
- Summary
Last week: Implementation
- Given the input point set:
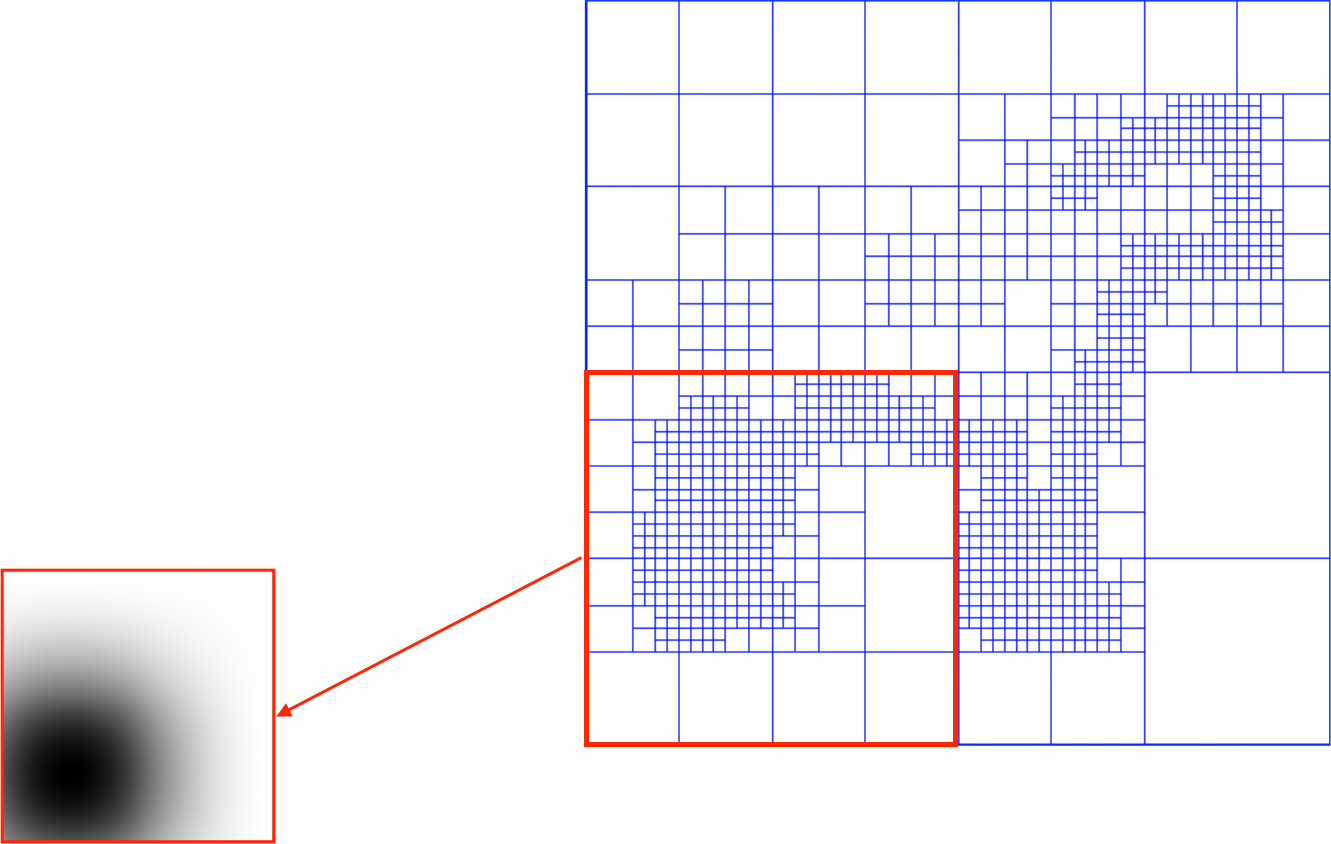
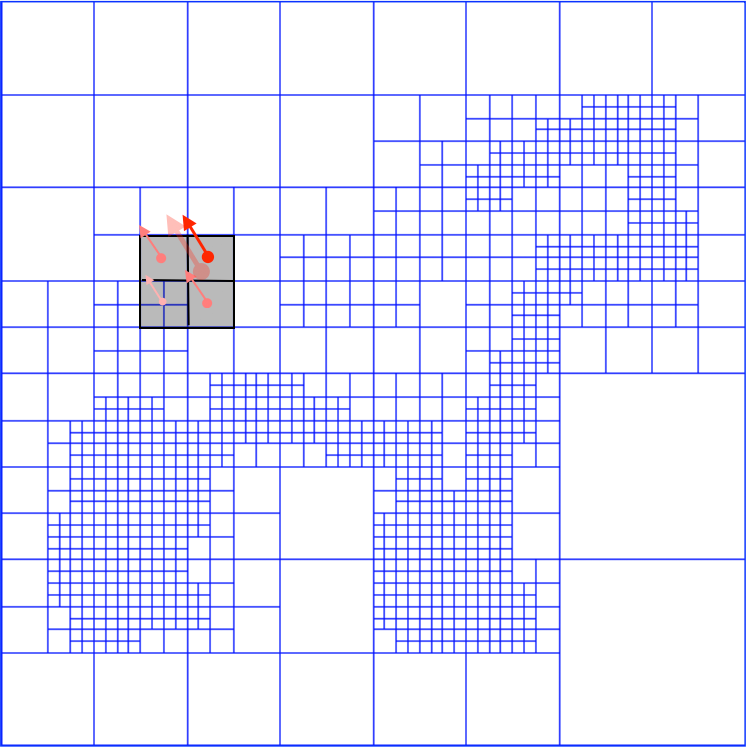
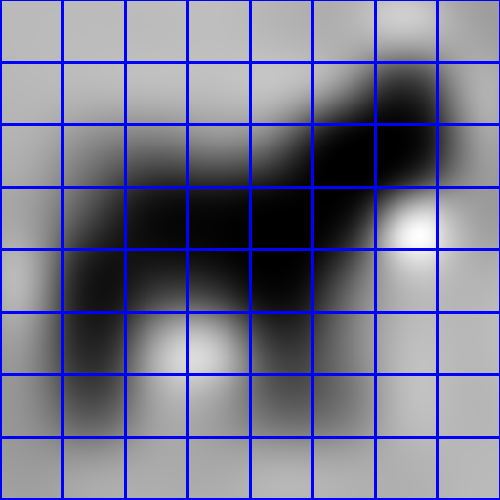
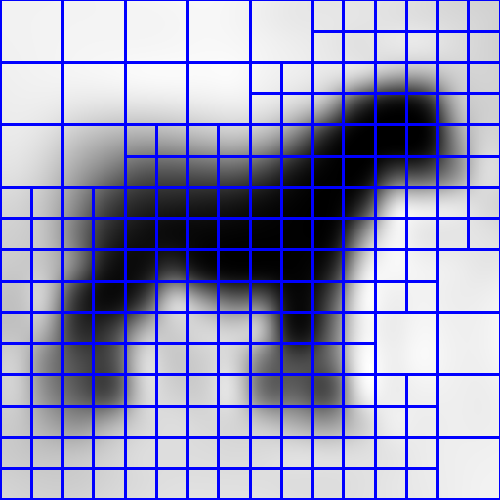
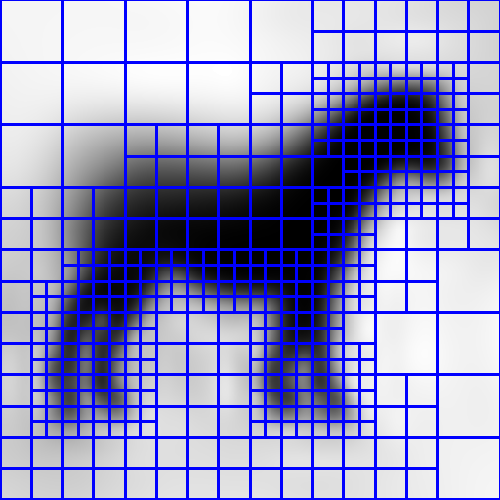
- Setup adaptive octree
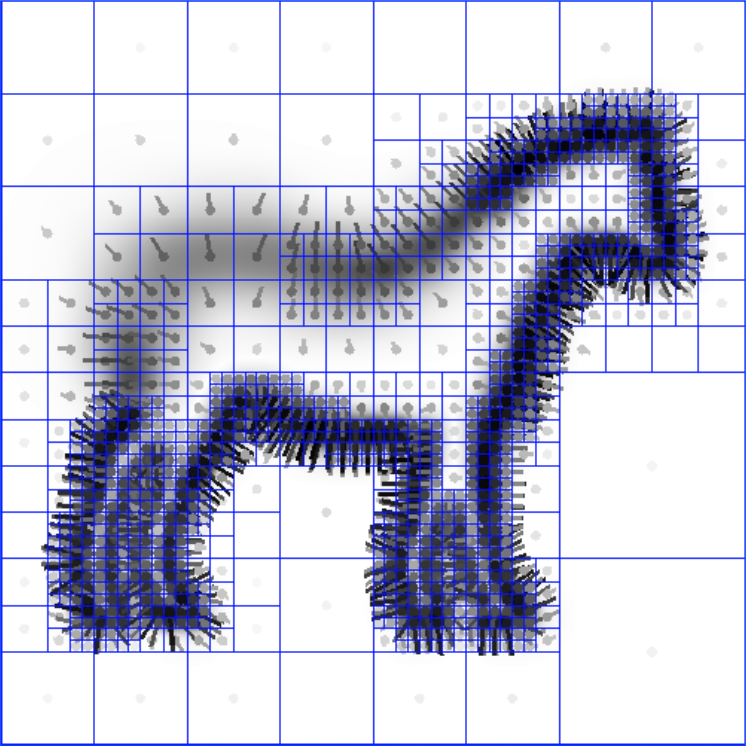
- Compute vector field
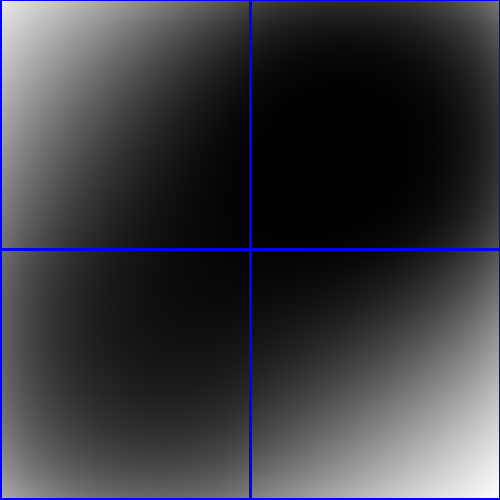
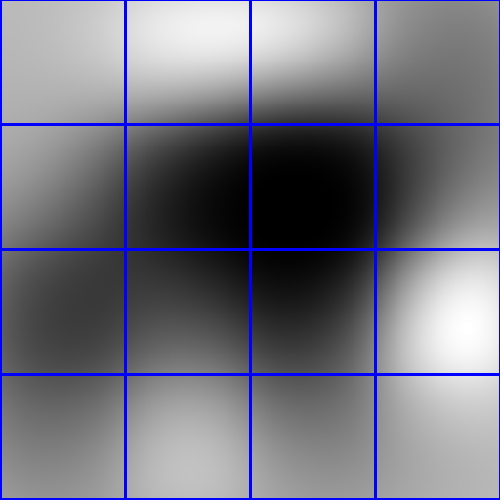
- Compute indicator function
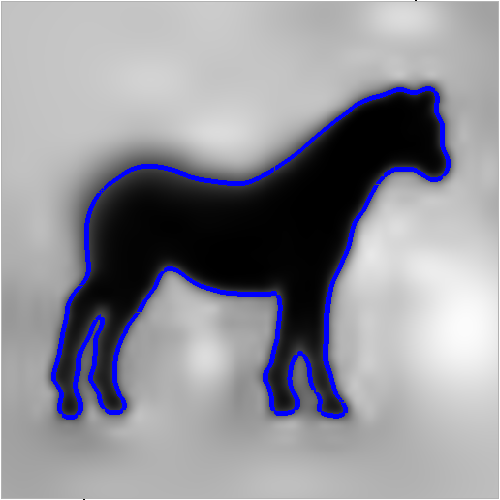
- Extract iso-surface
Last week: Implementation
- Given the input point set:
- Setup adaptive octree
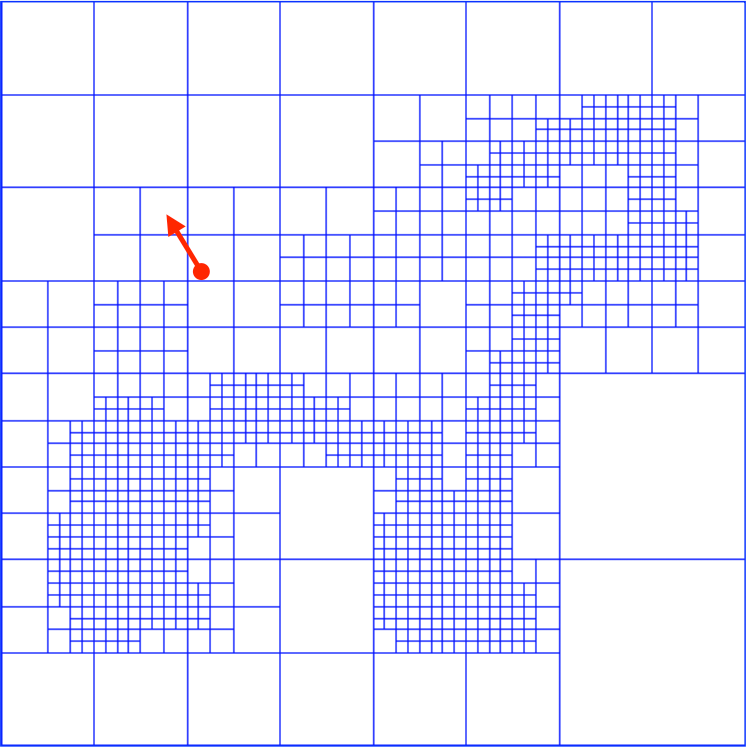
- Compute vector field
- Compute indicator function
- Extract iso-surface
Last week: Implementation
- Given the input point set:
- Setup adaptive octree
- Compute vector field
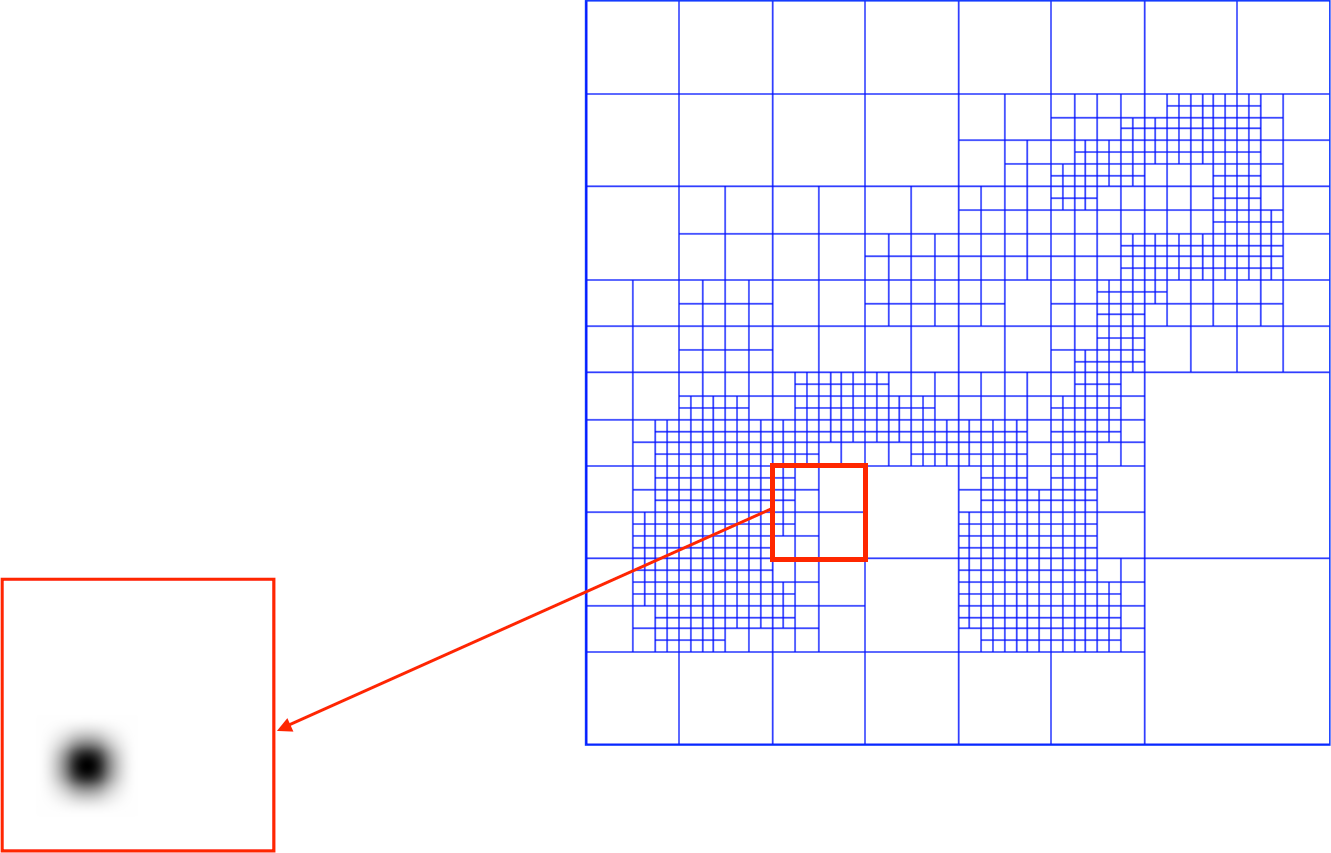
- Define function basis
- Splat the samples
- Compute indicator function
- Extract iso-surface
Last week: Implementation
- Given the input point set:
- Setup adaptive octree
- Compute vector field
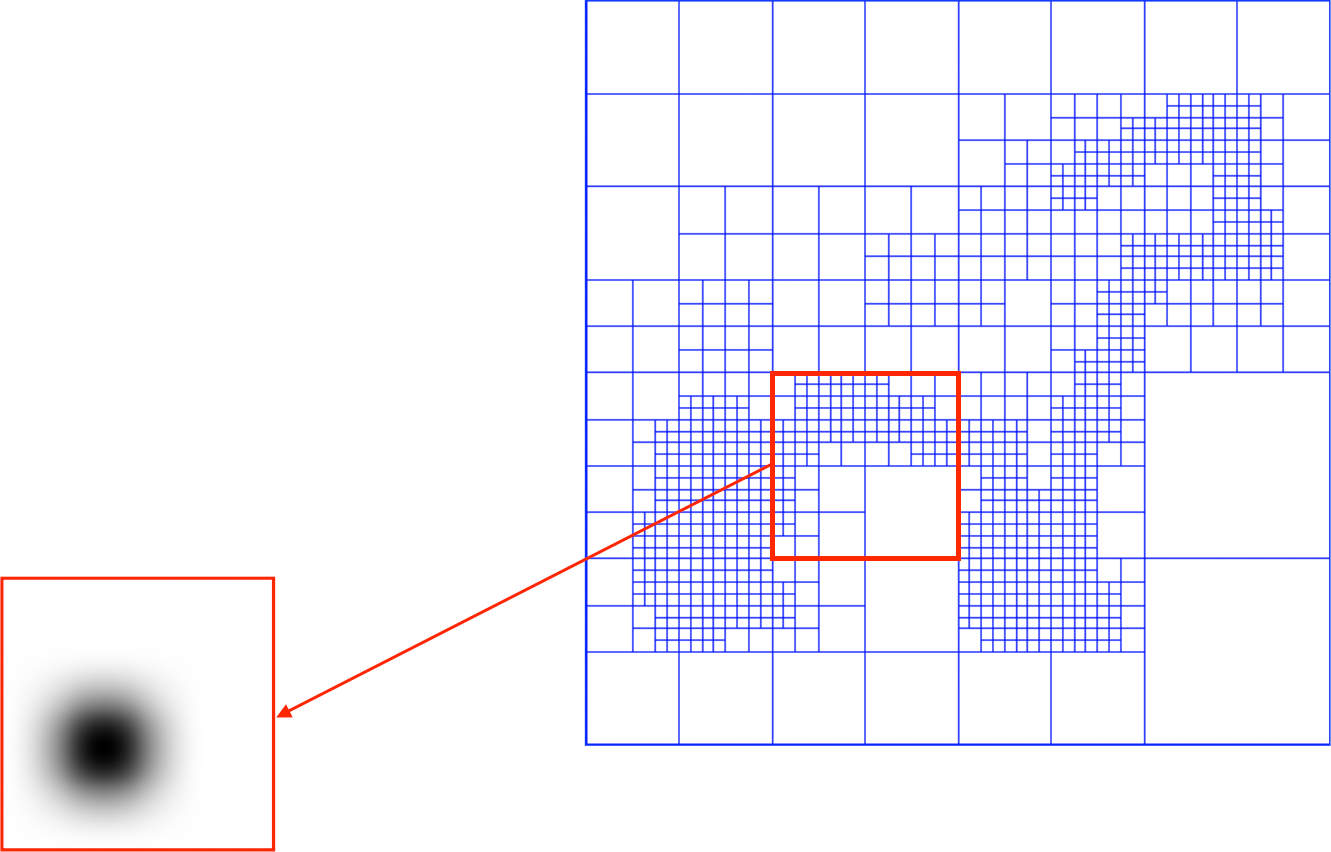
- Define function basis
- Splat the samples
- Compute indicator function
- Extract iso-surface
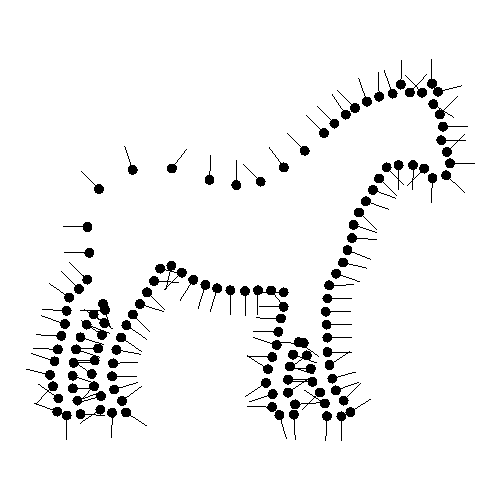
Last week: Implementation
- Given the input point set:
- Setup adaptive octree
- Compute vector field
- Define function basis
- Splat the samples
- Compute indicator function
- Extract iso-surface
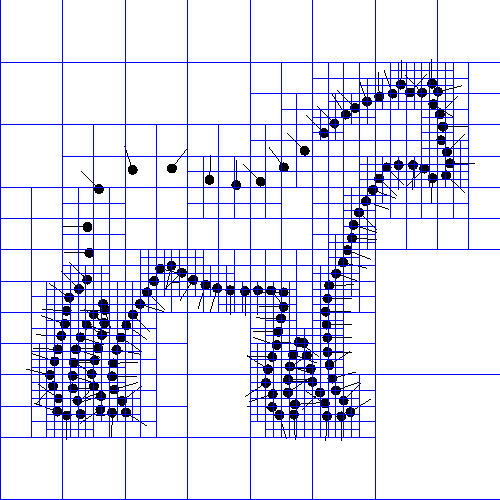
Last week: Implementation
- Given the input point set:
- Setup adaptive octree
- Compute vector field
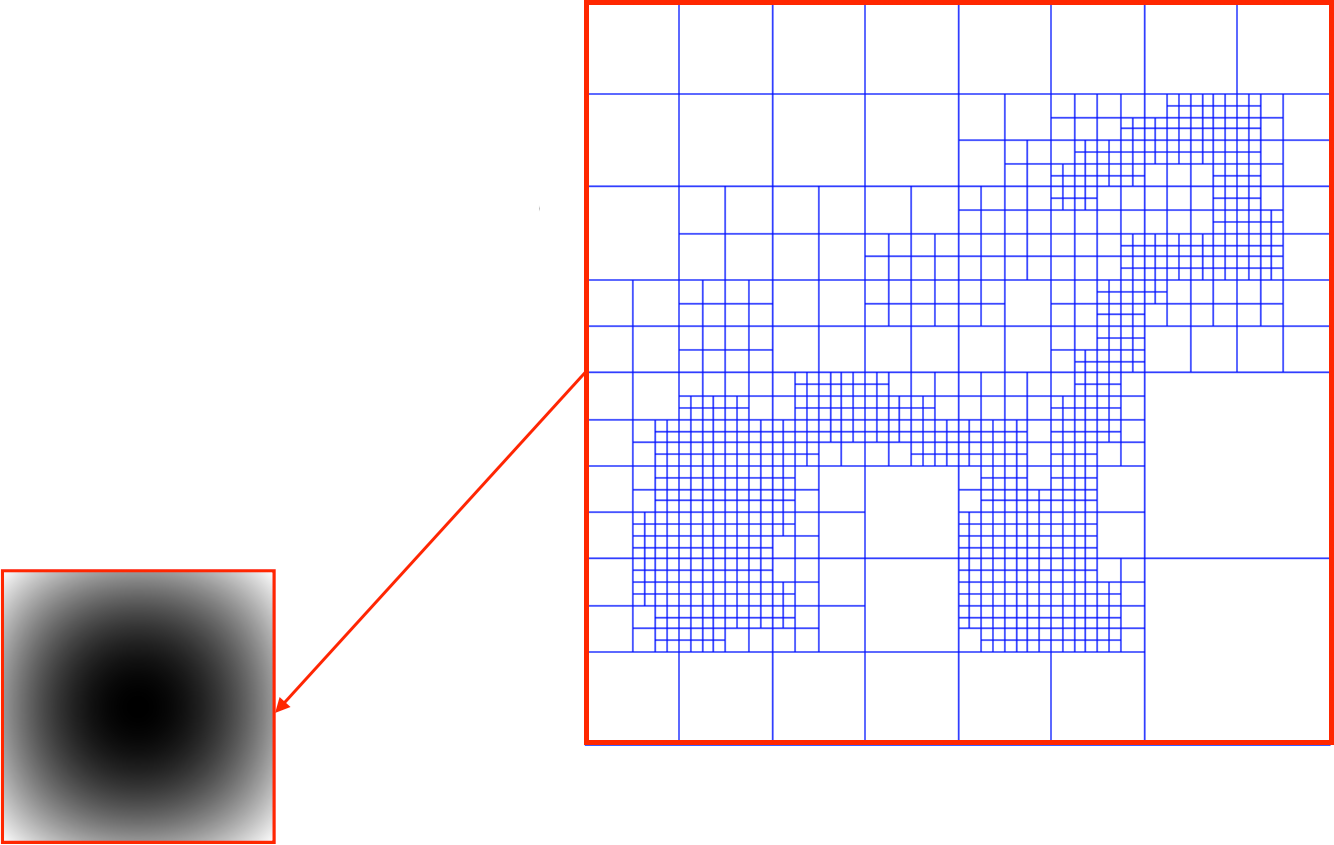
- Define function basis
- Splat the samples
- Compute indicator function
- Extract iso-surface
Last week: Implementation
- Given the input point set:
- Setup adaptive octree
- Compute vector field
- Compute indicator function
- Compute divergence
- Solve Poisson equation
- Extract iso-surface

Last week: Implementation
- Given the input point set:
- Setup adaptive octree
- Compute vector field
- Compute indicator function
- Compute divergence
- Solve Poisson equation
- Extract iso-surface

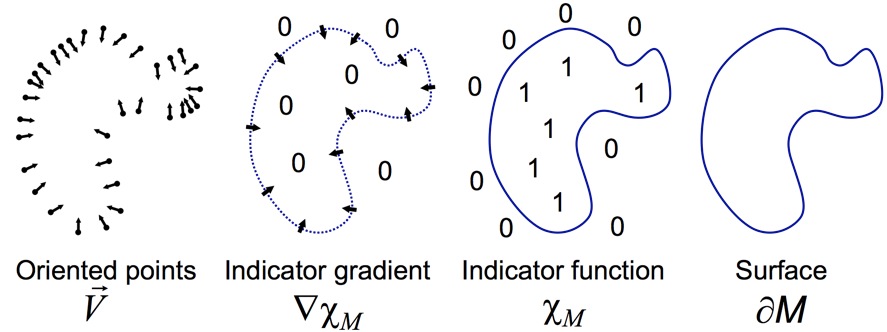
Last week: Implementation
- Given the input point set:
- Setup adaptive octree
- Compute vector field
- Compute indicator function
- Extract iso-surface
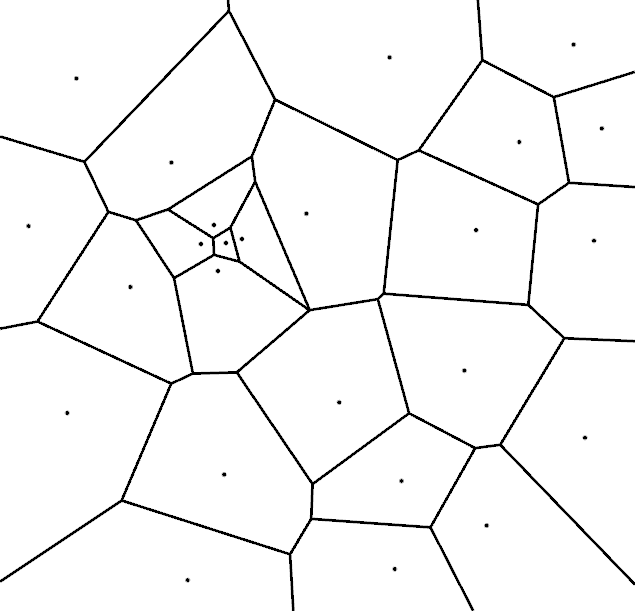
Definition
- Given a set of 2D sample points \(\{\mathbf{p}_1, \ldots , \mathbf{p}_n\}\)
- Partition the plane by assigning each 2D point \(\mathbf{x}\) to its nearest sample.
- All points assigned to \(\mathbf{p}_i\) form its Voronoi cell \[\mathcal{V}(\mathbf{p}_i) = \left\{ \mathbf{x} \in \mathbb{R}^2 : ||\mathbf{x}-\mathbf{p}_i|| \leq ||\mathbf{x}-\mathbf{p}_j|| \quad \forall j \neq i \right\}\]
- Edges and vertices of these cells form the Voronoi diagram (VD).

Voronoi Diagram




Voronoi Diagram
- Each point pair \(\mathbf{p}_i\), \(\mathbf{p}_j\) defines a perpendicular bisector
- The bisector of \(\mathbf{p}_i\) and \(\mathbf{p}_j\) defines two half-planes
- Let \(H(\mathbf{p}_i, \mathbf{p}_j)\) be the half-plane containing \(\mathbf{p}_i\)
- Voronoi cells are intersections of half-planes \[\mathcal{V}(\mathbf{p}_i)=\cap_{i\neq j} H(\mathbf{p}_i,\mathbf{p}_j)\]

Voronoi Diagram
Complexity of Voronoi Diagram
- Exactly one Voronoi cell per point, but cells are defined by intersecting \(n\) half-planes \[\mathcal{V}(\mathbf{p}_i)=\cap_{i\neq j} H(\mathbf{p}_i,\mathbf{p}_j)\]
- Cells could have \(O(n)\) edges
- VD could have \(O(n^2)\) edges
- Or is it just \(O(n)\) edges?

Voronoi Diagram


Complexity of Voronoi Diagram
- Dual graph of VD is a triangle mesh (why?)
- Dual: vertex \(\rightarrow\) face, edge \(\rightarrow\) edge, face \(\rightarrow\) vertex
- Euler formula for triangle meshes: \(E \approx 3V = O(n)\)
- Dual mesh has \(O(n)\) edges
- Primal mesh has \(O(n)\) edges
Properties of Voronoi Diagram
- Voronoi cells are convex
- Voronoi vertices have valence 3 (if no 4 points are co-circular)
- Voronoi vertices are circumcenters of its three defining sample points
- These circumcircles do not contain other sample points
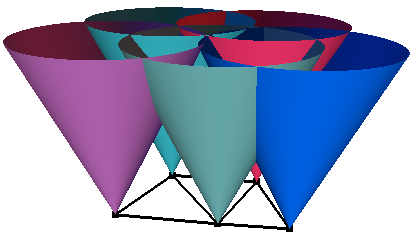
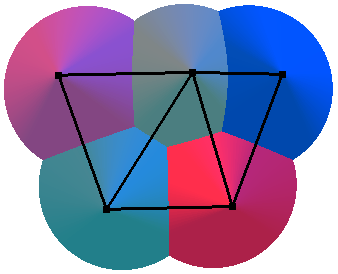
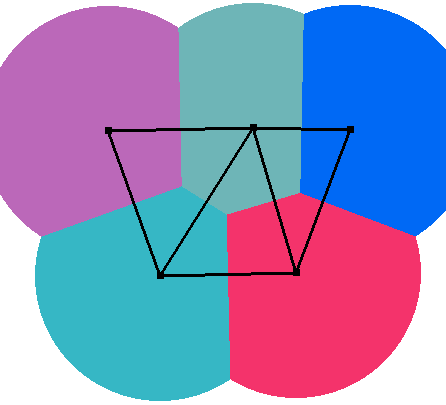
Voronoi Visualization
- Draw a cone in z-direction at each sample \(\mathbf{p}_i\)
- z-values measure distance from samples, i.e. \(z_i(\mathbf{x}) = dist(\mathbf{p}_i,\mathbf{x})\)
- View cones from below (parallel projection)
- Cone intersections project to Voronoi edges!
Delaunay Triangulation
- The dual graph of the Voronoi diagram is a planar straight line graph, the Delaunay triangulation (DT)

- Circumcircles of DT triangles are empty
- DT triangles are duals of VD vertices
- Criterion can be used for DT construction
Edge Flipping
- Check whether an edge is Delaunay by testing circumcircles of its incident triangles



- Flip edge to make it Delaunay



In-Circle Test
- How to efficiently compute \(InCircle(\mathbf{A}, \mathbf{B}, \mathbf{C}, \mathbf{D})\)? - Lift onto paraboloid: \((x,y) \rightarrow (x, y, x^2 + y^2)\) - Lifted points \(A'\), \(B'\), \(C'\) define a plane cutting through the paraboloid - 3D intersection curve projects to 2D circumcircle


In-Circle Test
- How to efficiently compute \(InCircle(\mathbf{A}, \mathbf{B}, \mathbf{C}, \mathbf{D})\)? - \(\mathbf{D}\) is in/out circumcircle \(\Leftrightarrow\) \(\mathbf{D}'\) is below/above plane - \(\mathbf{D}'\) below/above \(\Leftrightarrow\) \(volume(\mathbf{A}',\mathbf{B}',\mathbf{C}',\mathbf{D}') < 0\) or $ > 0$
\[InCircle(\mathbf{A}, \mathbf{B}, \mathbf{C}, \mathbf{D}) \Leftrightarrow -\det \left[ \begin{array}{cccc} A_x & A_y & A_x^2 + A_y^2 & 1 \\ B_x & B_y & B_x^2 + B_y^2 & 1 \\ C_x & C_y & C_x^2 + C_y^2 & 1 \\ D_x & D_y & D_x^2 + D_y^2 & 1 \end{array} \right] < 0 \]
In-Circle Test
- How to efficiently compute \(InCircle(\mathbf{A}, \mathbf{B}, \mathbf{C}, \mathbf{D})\)?
\[InCircle(\mathbf{A}, \mathbf{B}, \mathbf{C}, \mathbf{D}) \Leftrightarrow - \det \left[ \begin{array}{cccc} A_x & A_y & A_x^2 + A_y^2 & 1 \\ B_x & B_y & B_x^2 + B_y^2 & 1 \\ C_x & C_y & C_x^2 + C_y^2 & 1 \\ D_x & D_y & D_x^2 + D_y^2 & 1 \end{array} \right] < 0 \]
- Swapping rows in determinants
- \(InCircle(\mathbf{A}, \mathbf{B}, \mathbf{C}, \mathbf{D}) == InCircle(\mathbf{C}, \mathbf{D}, \mathbf{A}, \mathbf{B})\)
- \(InCircle(\mathbf{A}, \mathbf{B}, \mathbf{C}, \mathbf{D}) == -InCircle(\mathbf{B}, \mathbf{C}, \mathbf{D}, \mathbf{A})\)

Maximum Minimum Angle
- Delaunay criterion maximizes the minimum angle
- Can be seen from Thales’ theorem
- Delaunay triangulation avoids small angles
- Leads to numerically preferable meshes
- Most important advantage of DT
Incremental Algorithm












Constrained Delaunay Triangulation
- Enforce certain edges in triangulation
- Either prevent flipping (\(\rightarrow\) bad triangles)
- Or subdivide edges sufficiently (\(\rightarrow\) many triangles)







2D Meshing
2D Meshing
- 2D Delaunay triangulation
- Maximizes minimum angle
- Optimal triangulation for given set of vertices
- Why can there still be bad triangles?

Delaunay Refinement
- Delaunay triangulation might contain bad triangles, depending on vertex distribution
- Refine triangulation
- Insert new vertices, eliminate bad triangles
- Measure triangle quality by
- circumradius / shortest-edge
- smallest inner angles

Delaunay Refinement
- Insert new vertices to eliminate bad triangles
- Eliminate “bad” triangles by inserting their circumcenter into the triangulation
- Bad triangle will fail the empty-circumcircle test and will therefore be removed



Delaunay Refinement
- Insert new vertices to eliminate bad triangles
- Eliminate “bad” triangles by inserting their circumcenter into the triangulation
- Bad triangle will fail the empty-circumcircle test and will therefore be removed

2D Meshing

Delaunay Refinement

Centroidal Voronoi Diagrams
- How can we get a more regular triangulation?
- Delaunay triangulation of Centroidal Voronoi Diagram (CVD)
- Definition:
- All points are centroids of their Voronoi cells

Centroidal Voronoi Diagrams

Centroidal Voronoi Diagrams

Literature
- Botsch et al., Polygon Mesh Processing, AK Peters, 2010.
- Chapter 6.4

de Berg et al., Computational Geometry: Algorithms and Applications, Springer Verlag, 2008.
O’Rourke, Computational Geometry in C, Cambridge University Press, 1998.