\(\vec{x}\of{t}\) defines the position of particle at time \(t\)
Tangent \(\vec{x}’\of{t}\) defines the velocity vector at time \(t\)
Length (magnitude) of tangent vector is particle speed
Curve as Particle Trajectory
Recall: Re-parameterization
Example
For \(t \in [0, 1]\), the two curves \(\vec{x}_1(t) = \matrix{\cos\of{ t} \\ \sin\of{ t}}\) and \(\vec{x}_2(t) = \matrix{\cos\of{ t^2} \\ \sin\of{ t^2}}\) define the same particle path
We see that a curve can be parameterized in different ways. But is there a unique, canonical way to parameterize a curve?
Yes! It’s called arc length parameterization
Parameterize curve \(\vec{x}(s)\) over interval \([0, L]\) such that length from \(\vec{x}(0)\) to \(\vec{x}(s)\) is equal to \(s\)\[\int_0^s \norm{\vec{x}'(t)}\func{d}t \;=\; s\]
Arc Length Parameterization
Intuitively, think about a rope of length \(L = \int \norm{\vec{x}’} \mathrm{d}t\) that is bend (but not stretched or compressed!) to assume the shape of the curve
Curves parameterized with respect to arc length have some useful properties
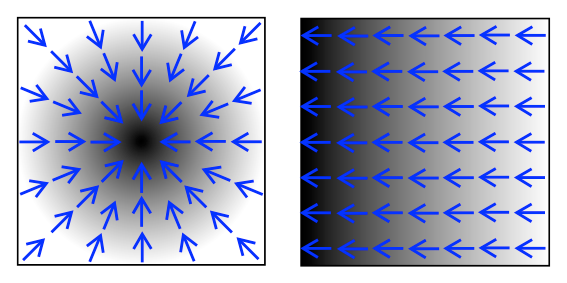
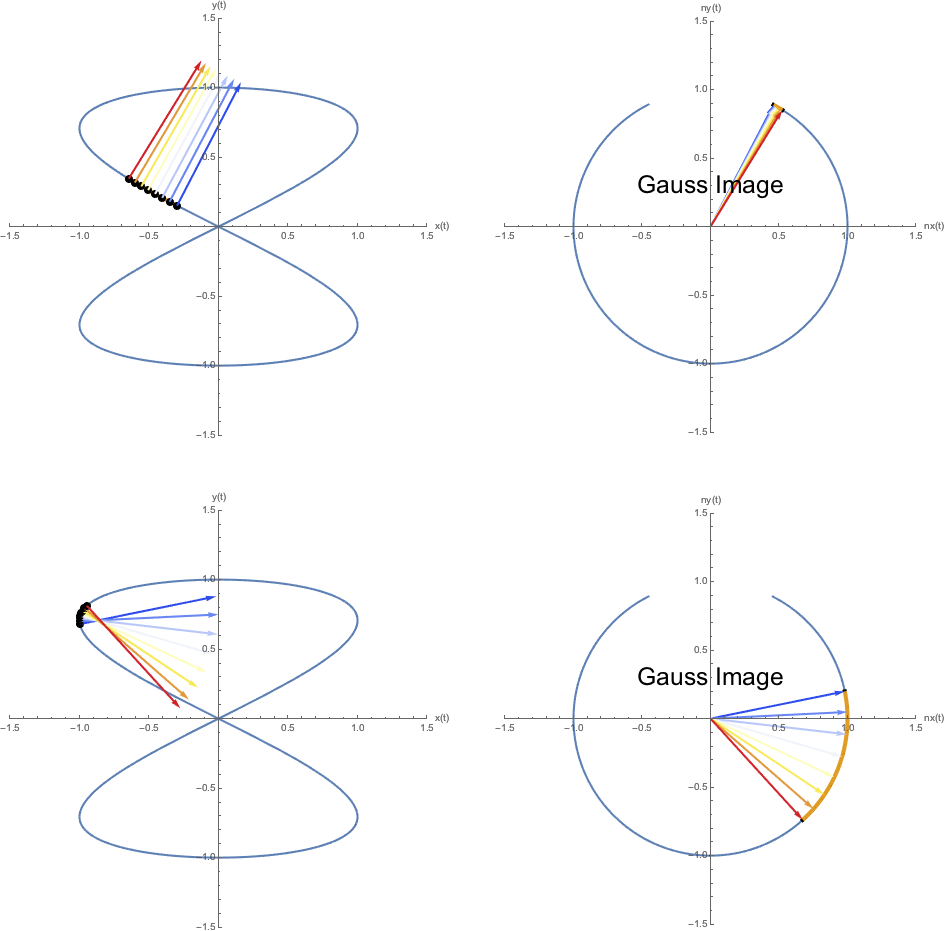
Curvature is a measure of how much the curve deviates from a straight line
This can be quantified by looking at how much the curve normal varies as we traverse the curve
The curve normal vector is \(\vec{n} = \text{Rot}(90) \frac{\vec{t}}{\| \vec{t} \|}\)
The Gauss map of the curve \(\vec{x}\of{t}\) maps the parameter interval \([a,b]\) to the unit circle: \(\vec{n}: [a,b] \mapsto S^1\)
This means that for every \(t \in [a,b]\) we obtain a point on the unit circle defined by the curve normal \(\vec{n}(t)\) at point \(\vec{x}\of{t}\)
Gauss Map
Curvature
Let \(\Omega = [t-\epsilon, t+\epsilon]\) be a small interval around parameter \(t\), \(l_{\vec{x}}\of{\epsilon}\) be the length of the curve segment \(\vec{x}\of{\Omega}\), and \(l_{\vec{n}}\of{\epsilon}\) be the length of the corresponding segment of the Gauss map
Then the magnitude of the curvature at point \(\vec{x}\of{t}\) is def. as \[|\kappa \of{t}| = \lim_{\epsilon \rightarrow 0} \frac{l_{\vec{n}}\of{\epsilon}}{l_{\vec{x}}\of{\epsilon}}\]
If a curve is parameterized by arc length, then curvature is simply the magnitude of the second derivative \[ \vec{t}'(s) = \vec{x}''(s) = \kappa\of{s} \vec{n}(s) \; \rightarrow \; |\kappa\of{s}| = | \vec{x}''(s) | \]
For general parametrizations \(\quad \kappa \of{t} = \frac{ || \vec{x}'(t) \times \vec{x}''(t) || }{ ||\vec{x}'(t)||^3 }\)
Curvature
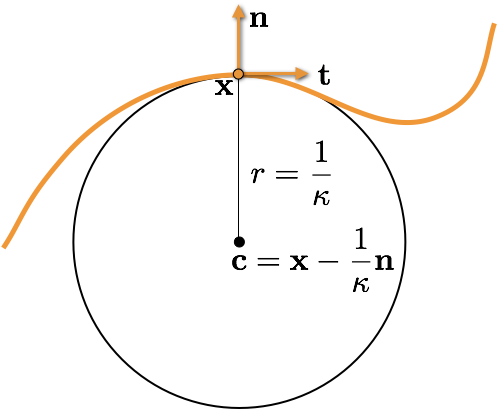
The osculating circle at point \(\vec{x}\) is the circle tangent to the curve at \(\vec{x}\) that best approximates the curve locally
Its center is given as \(\vec{x} + \frac{1}{\kappa} \vec{n}\), where \(\kappa\) is the signed curvature and \(\vec{n}\) is the normal at \(\vec{x}\).
Its radius is the inverse of the absolute curvature, i.e. \(1/|\kappa|\)
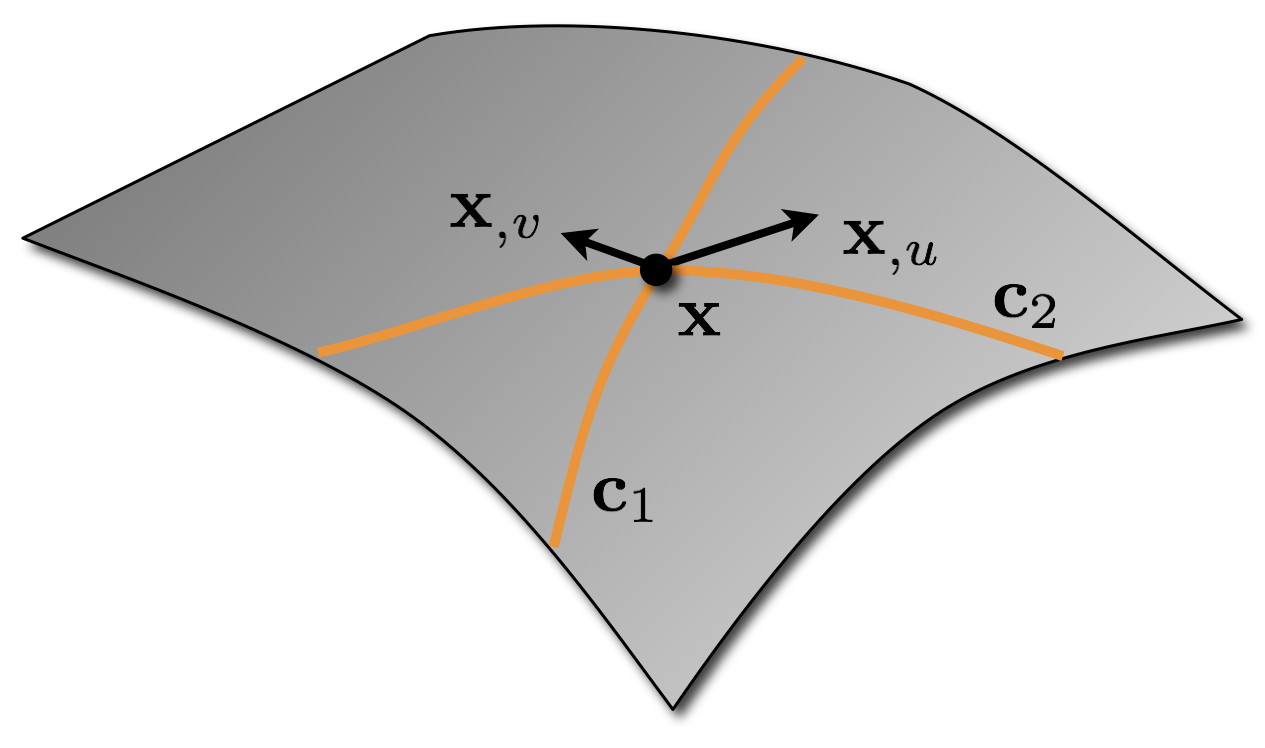
\[\vec{x}\of{u,v} \;=\;
\matrix{\cos u \sin v \\ \sin u \sin v \\ \cos v}
\,,\quad (u,v) \in [0, 2\pi) \times [0,\pi)
\]
Example: Unit Sphere
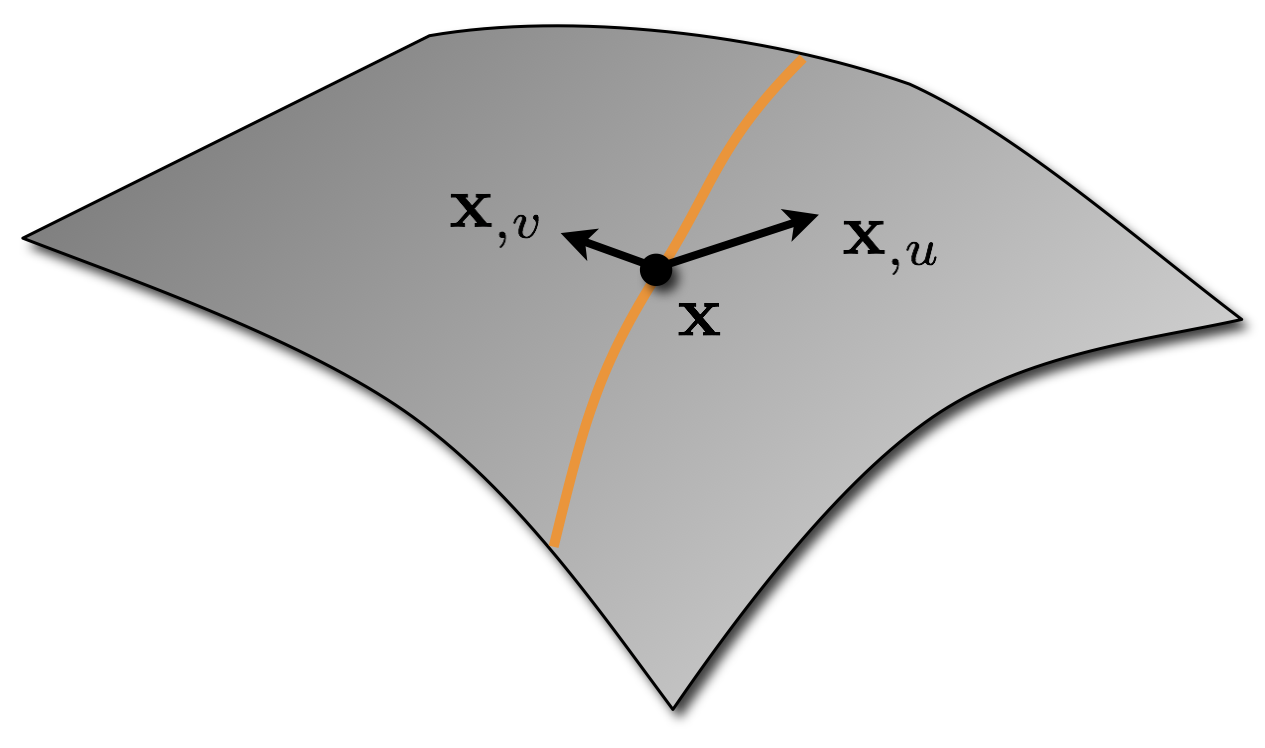
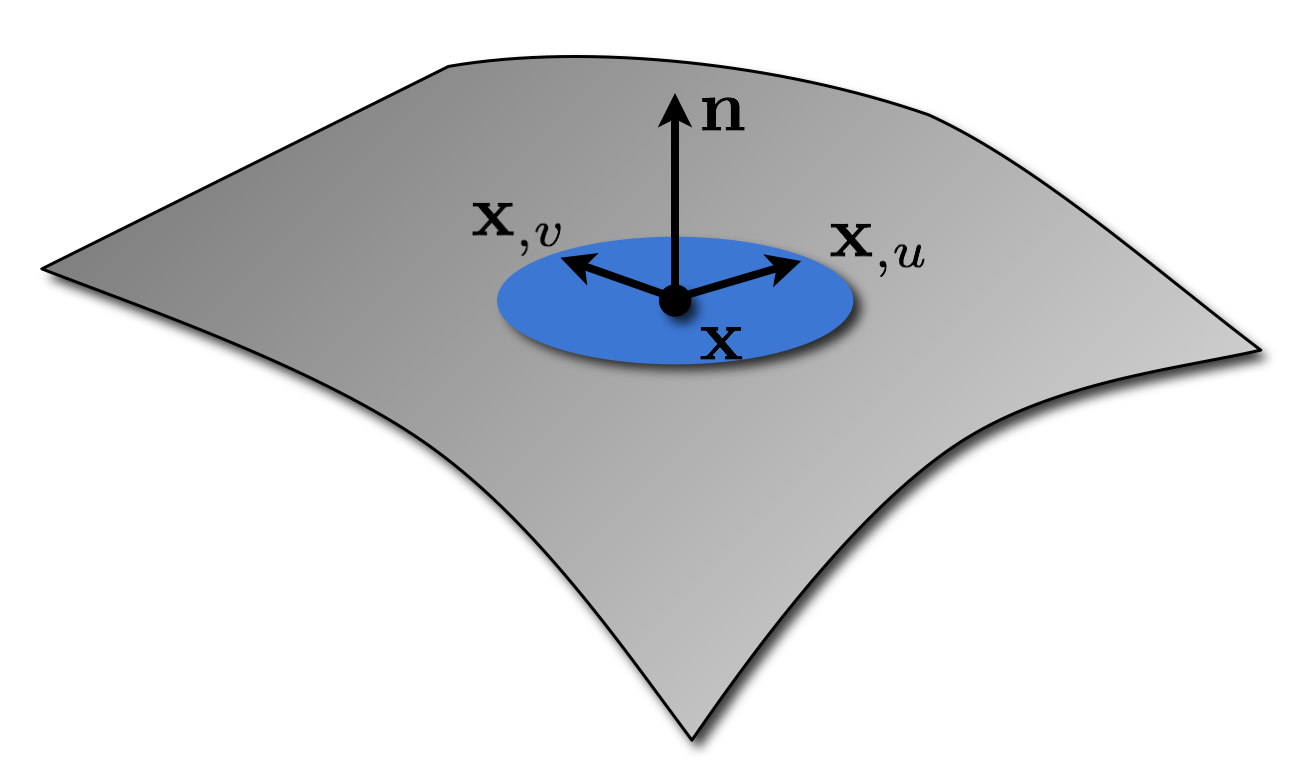
Tangent vectors \[
\vec{x}_{,u}\of{u,v} \;=\;
\matrix{-\sin u \sin v \\ \cos u \sin v \\ 0}
\quad
\vec{x}_{,v}\of{u,v} \;=\;
\matrix{\cos u \cos v \\ \sin u \cos v \\-\sin v}
\]
First fundamental form \[
\mat{I} \;=\;
\matrix{ E & F \\ F & G } \;:=\;
\matrix{
\trans{\vec{x}_{,u}} \vec{x}_{,u} & \trans{\vec{x}_{,u}} \vec{x}_{,v} \\[1mm]
\trans{\vec{x}_{,u}} \vec{x}_{,v} & \trans{\vec{x}_{,v}} \vec{x}_{,v}
} \; = \;
\matrix{ \sin^2 v & 0 \\ 0 & 1 }
\]
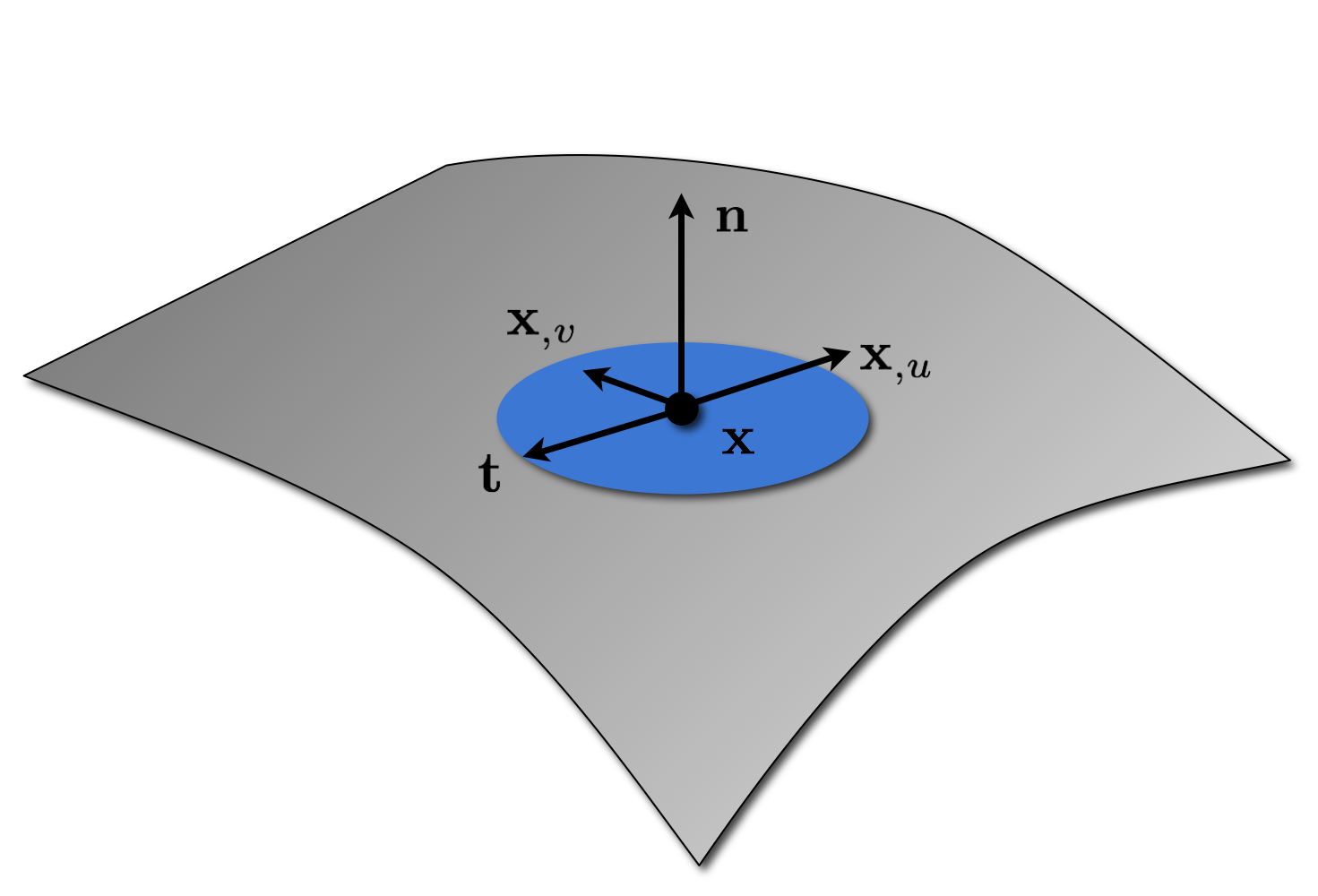
Let \(\vec{t}\) be a tangent vector at \(\vec{x}\).
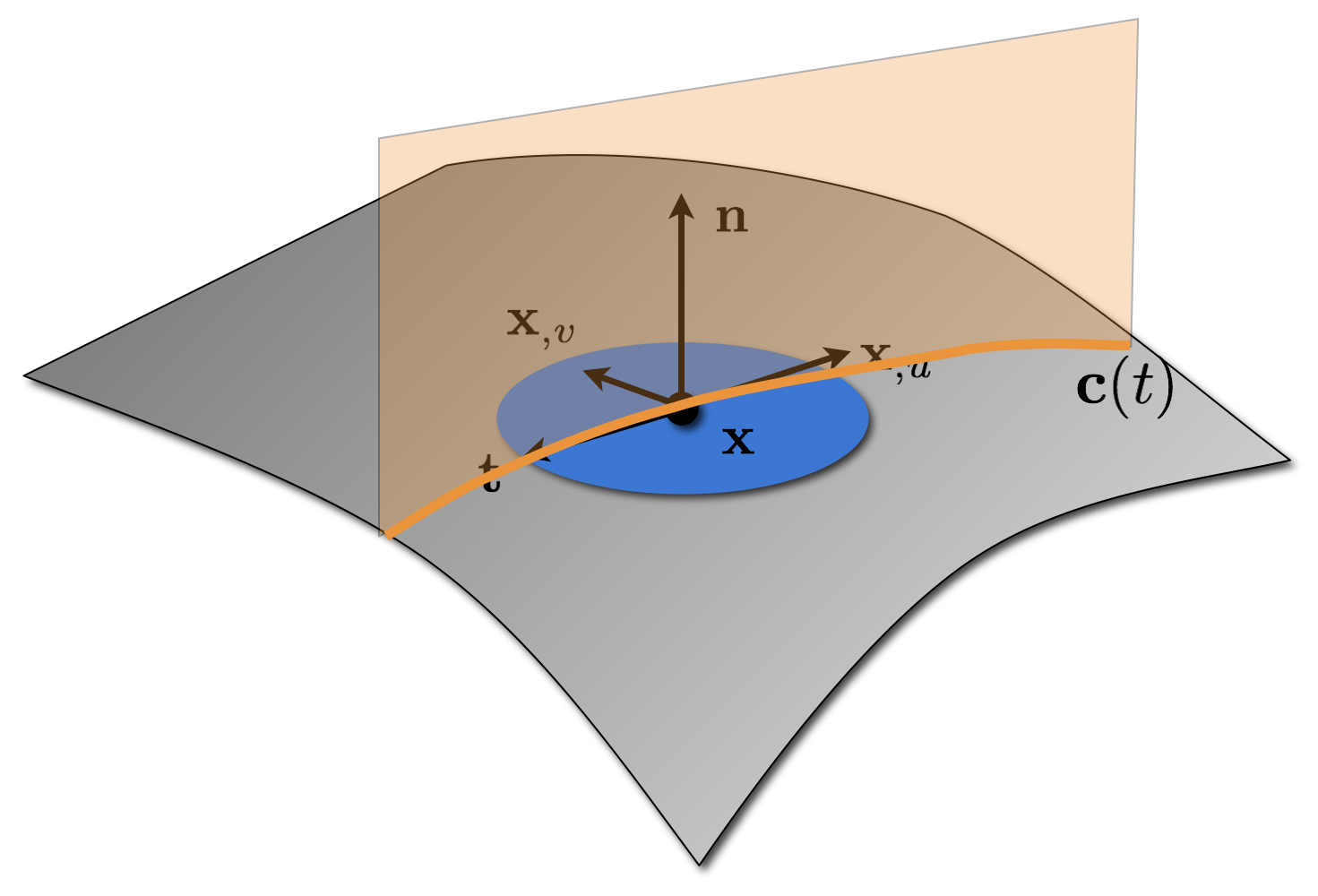
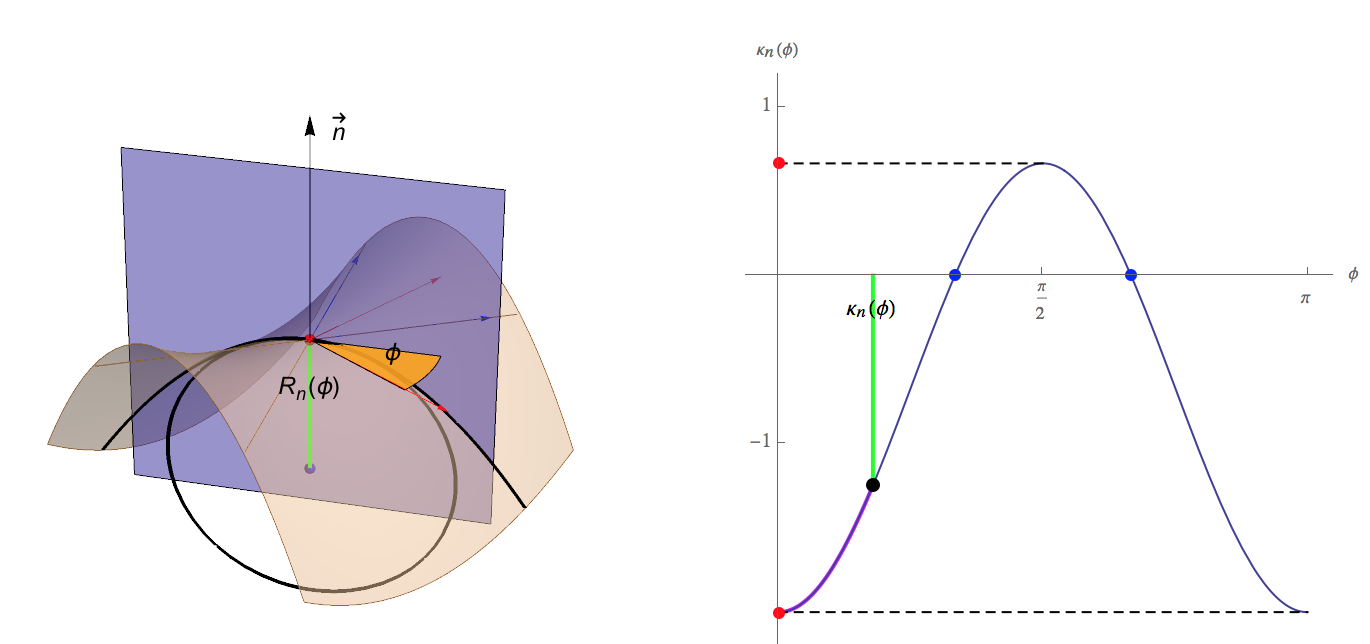
Normal Curvature
Let \(\vec{t}\) be a tangent vector at \(\vec{x}\).
\(\vec{x}\), \(\vec{n}\), and \(\vec{t}\) define a normal plane. The intersection of this plane with the surface yields a curve \(\vec{x}(t)\), called a normal section.
Normal Curvature
Normal curvature \(\kappa_n(\vec{t})\) is defined as the curvature of the normal section \(\vec{x}(t)\) at the point \(\vec{x}(u,v)\).
If we write \(\vec{t} = a\vec{x}_{,u} + b\vec{x}_{,v}\), the normal curvature can be computed as
Let \(\vec{t}(\phi) = \cos \phi \vec{x}_{,u} + \sin \phi \vec{x}_{,v}\) be a tangent vector at \(\vec{x}\) and assume that \(\vec{x}_{,u}\) and \(\vec{x}_{,v}\) are orthonormal.
We can plot \(\kappa_n(\vec{t}(\phi))\) as a function of the tangent angle \(\phi\)
Surface Curvature(s)
Principal curvatures
Maximum curvature \(\kappa_1 = \max_{\phi} \kappa_n(\phi)\)









{kind=link}