Computer Graphics
Rasterization in Detail
Computer Graphics
Group


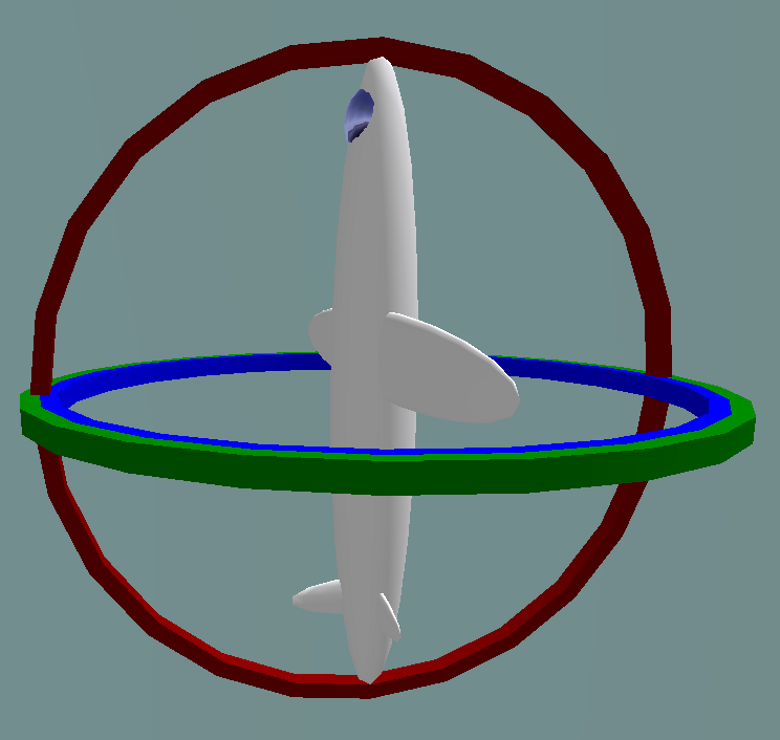
Rotation around x/y/z axes
- Can we compose any 3D rotation from \(\mat{R}_x\), \(\mat{R}_y\), \(\mat{R}_z\)? \[ \mat{R}\of{\alpha, \beta, \gamma} \;\stackrel{?}{=}\; \mat{R}_x\of{\alpha} \cdot \mat{R}_y\of{\beta} \cdot \mat{R}_z\of{\gamma}\]
- This representation is called Euler angles
- Often used in flight simulators: roll, pitch, yaw
- Problem: gimbal lock!
Transformation Pipeline
- View Transformation
- setup extrinsic camera parameters: position and orientation
- Projection Transformation
- setup intrinsic camera parameters: opening angle and depth range
- Viewport Transformation
- setup image parameters/resolution: width and height

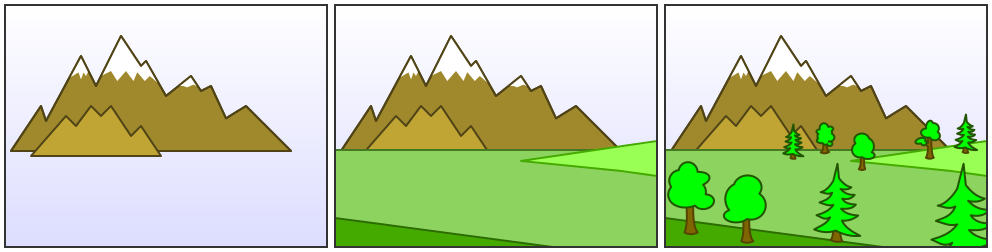
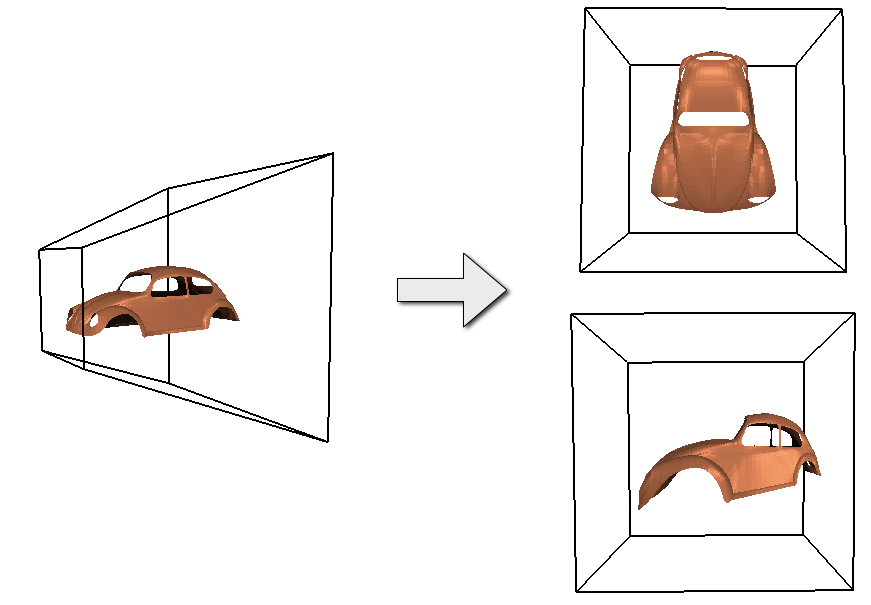
Generic Perspective Projection
- Standard projection
- Center of projection: \((0,0,0)\)
- Image plane at \(z=-d\)

\[ \vector{x\\y\\z} \;\mapsto\; \vector{x \cdot \frac{-d}{z} \\ y \cdot \frac{-d}{z} \\ -d} \quad\longleftrightarrow\quad \matrix{ 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & -1/d & 0 } \cdot \vector{x\\y\\z\\1} \;=\; \vector{x\\y\\z\\-z/d} \;\cong\; \vector{x \frac{-d}{z} \\ y \frac{-d}{z} \\ -d\\ 1} \]
Rasterization Pipeline

Ray Tracing vs. Rasterization
- Ray Tracing
- Shoot rays from 2D pixels into 3D scene
- “backward rendering”
- needs ray intersections

- Rasterization
- Project 3D objects onto 2D image plane
- “forward rendering”
- needs transformations & projections

Rasterization Pipeline

Transformations & Projections

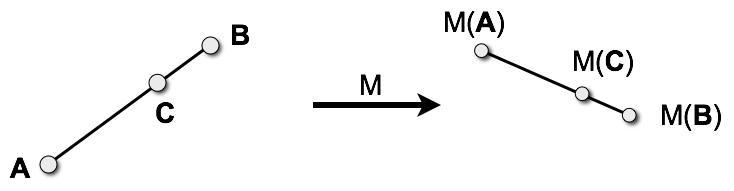
Affine Transformations of Lines
- Affine transformation \(\mat{M}\) preserves affine combinations \[ \mat{M}\of{(1-\alpha)\vec{A} + \alpha\vec{B}} \;=\; (1-\alpha)\mat{M}\of{\vec{A}} + \alpha\mat{M}\of{\vec{B}} \]
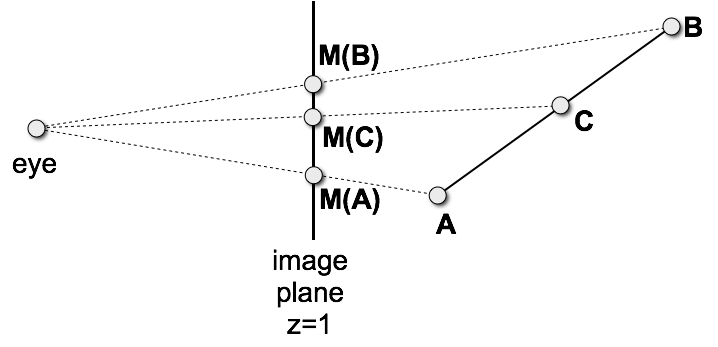
Projective Transformations of Lines
- For a central projection \(\mat{P}(\vec{X}) = \frac{\vec{X}}{\vec{X}_z}\) we can show that \(\mat{P}\of{\vec{X}\of{\alpha}} = \frac{(1-\alpha)\vec{A} + \alpha\vec{B}}{(1-\alpha)\vec{A}_z + \alpha\vec{B}_z} = (1-\beta) \frac{\vec{A}}{\vec{A}_z} + \beta \frac{\vec{B}}{\vec{B}_z}\) if we chose \(\beta \;=\; \frac{\alpha\vec{B}_z}{(1-\alpha)\vec{A}_z + \alpha\vec{B}_z}\)
- Same argument holds for general projective transformations.
Lighting

Normal Vectors
- Triangle normal \[ \vec{n}(T) = \frac{\left(\vec{b}-\vec{a}\right) \times \left(\vec{c}-\vec{a}\right)} {\norm{\left(\vec{b}-\vec{a}\right) \times\left(\vec{c}-\vec{a}\right)}} \]
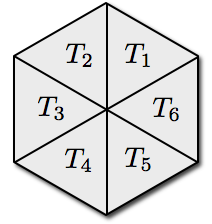
- Vertex normal \[ \vec{n}(V) = \frac{ \sum_{T_i \ni V} w(T_i) \, \vec{n}(T_i)} { \norm{ \sum_{T_i \ni V} w(T_i) \, \vec{n}(T_i)} } \]
Vertex Normals
 triangulation (flat shading)
triangulation (flat shading) 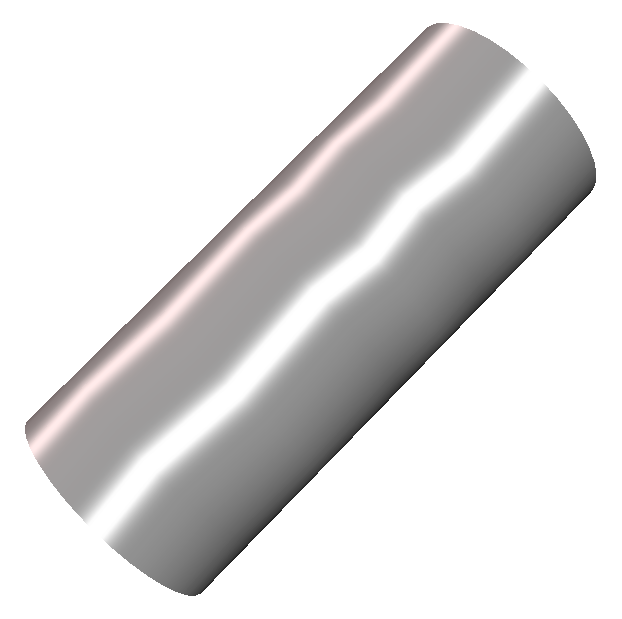 no weighting
no weighting  angle-weighted
angle-weighted
Phong Lighting Model
- Ambient lighting
- approximate global light transport / exchange
- uniform in, uniform out
- Diffuse lighting
- dull / matt surfaces
- directed in, uniform out
- Specular lighting
- shiny surfaces
- directed in, directed out
Phong Lighting Model
 ambient: \(I_a m_a\)
ambient: \(I_a m_a\)  diffuse: \(I_l m_d \left( \vec{n} \cdot \vec{l} \right)\)
diffuse: \(I_l m_d \left( \vec{n} \cdot \vec{l} \right)\)  specular: \(I_l m_s \left( \vec{r} \cdot \vec{v} \right)^s\)
specular: \(I_l m_s \left( \vec{r} \cdot \vec{v} \right)^s\)
\[ I \;=\; I_a m_a + I_l \left( m_d \left( \vec{n} \cdot \vec{l} \right) + m_s \left( \vec{r} \cdot \vec{v} \right)^s \right) \]
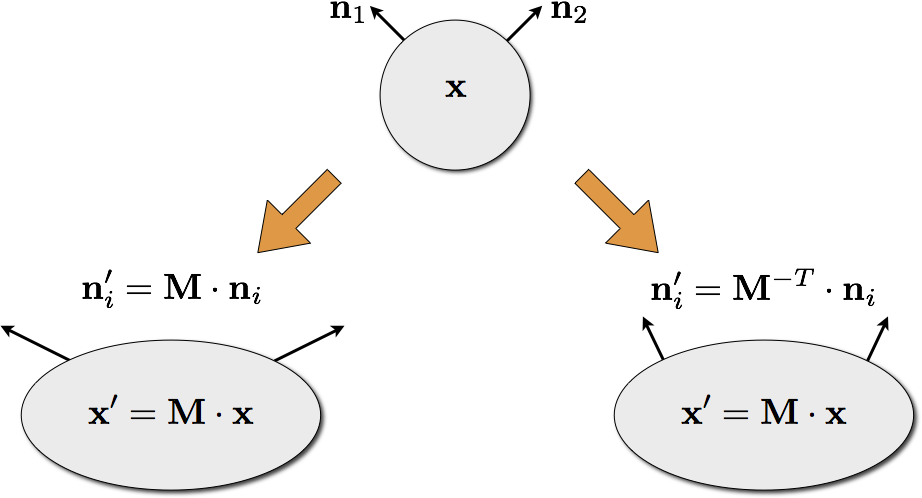
How to transform normal vectors?
Clipping

Rasterization

Line Rasterization
- Discretize line from \((x_0, y_0)\) to \((x_1, y_1)\) to pixel grid.
- Endpoints are integer coordinates (pixel positions)
- Assume slope is in \([0,1]\) and \(x_0 < x_1\)
- Other cases follow by symmetry

How would you implement this?
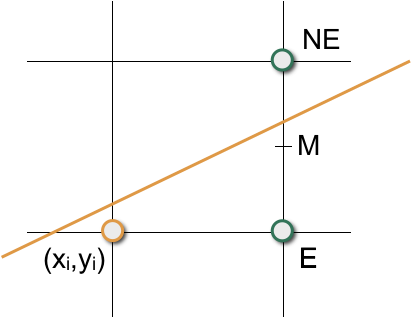
Bresenham Algorithm
- Next pixel can only be east (E) or north-east (NE)
- Is the line below/above midpoint \(\vec{M}\)?
- Use a decision variable \(d\):
- \(d = F(M) = F(x_i+1, y_i+0.5)\)
- If \(d \leq 0\) then go east
- If \(d > 0\) then go north-east
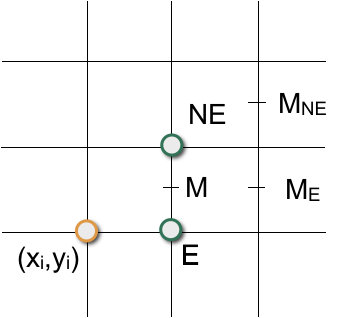
Bresenham Algorithm
- Incrementally update decision variable \(d\)!
- If east was chosen:
- \(d_\mathrm{new} = F(x_i+2, y_i+0.5) = d_\mathrm{old} + a\)
- \(\Delta\mathrm{E} := a = \Delta y\)
- If north-east was chosen:
- \(d_\mathrm{new} = F(x_i+2, y_i+1.5) = d_\mathrm{old} + a + b\)
- \(\Delta\mathrm{NE} := a + b = \Delta y - \Delta x\)
Why only integer arithmetic?
Crucial for systems without FPU
Triangle Rasterization
- Enumerate all pixels inside a 2D triangle
- Inside test for every pixel is too expensive
- Compute horizontal spans in each scanline
- Compute intersections with triangle edge, fill inbetween

- Many special cases to consider!
Triangle Rasterization
Shading

Shading: Fill the Interior
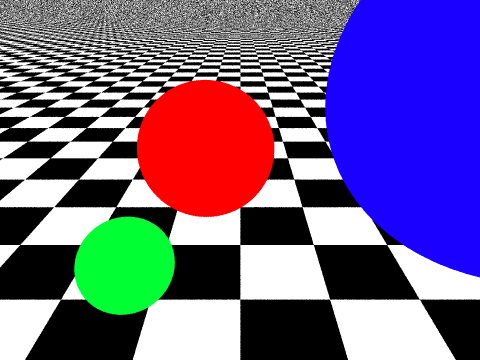
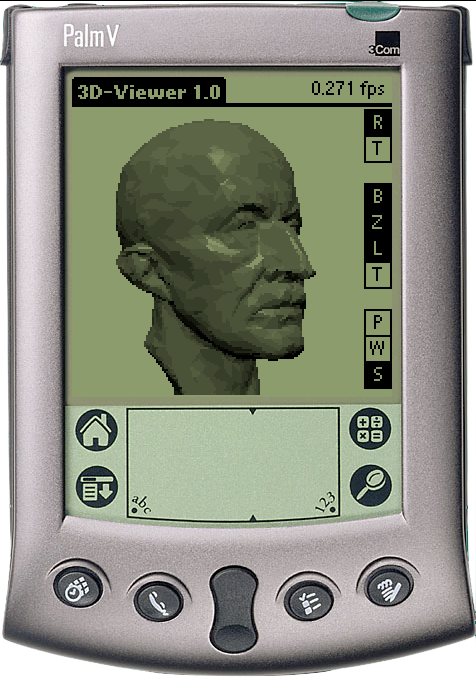
- Flat Shading
- Compute Phong lighting per face
- Facetted appearance
- Mach band effect
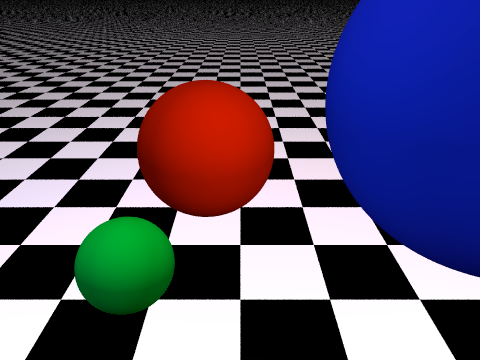
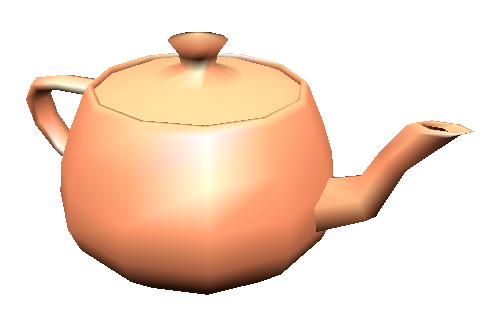
- Gouraud Shading
- Compute Phong lighting per vertex
- Linear interpolation of colors
- Looses small highlights
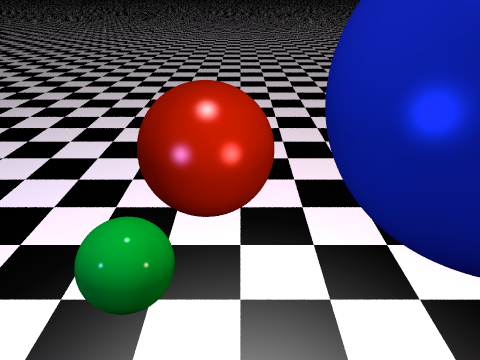
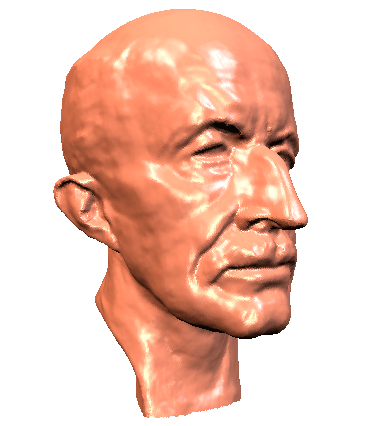
- Phong Shading
- Linear interpolation of vertex normals
- Compute Phong lighting per pixel
- Captures small highlights


Shading: Fill the Interior
 Flat Shading
Flat Shading  Gouraud Shading
Gouraud Shading  Phong Shading
Phong Shading
Visibility

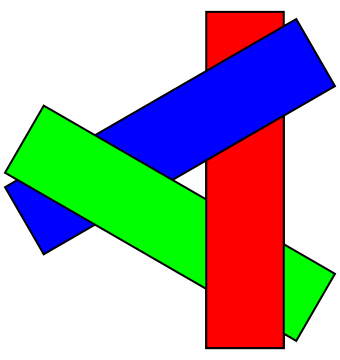
Painter’s Algorithm
- Idea: How do painters paint?
- Draw objects/triangles from back to front
- Overwrites polygons in the back
Painter’s Algorithm
- Repeated swap → cyclic overlap
- Split \(A\) at supporting plane of \(B\) or vice versa
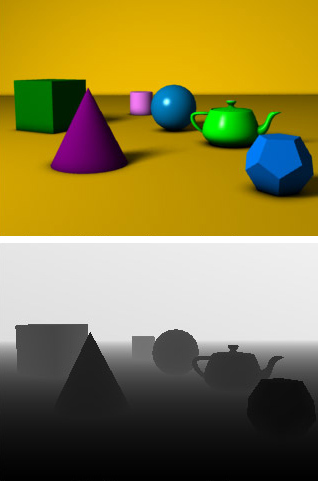
Z-Buffer
- Store current min. z-value for each pixel
- After model transformation, view transformation, projection transformation, and viewport transformation
- Additional buffer for depth values
- Framebuffer stores RBG color values
- Depth buffer (z-buffer) stores depth values
- Storage: additional 16 to 32 bits per pixel
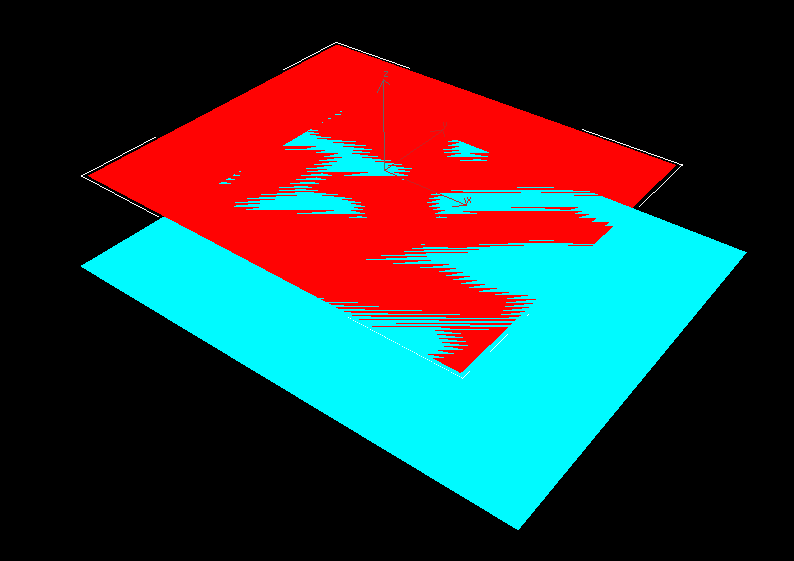
Z-Buffer

Z-Buffer
- Z-fighting
Z-Buffer
- Higher resolution at near plane!
Rasterization Pipeline
Literature
- Hughes et al.: Computer Graphics: Principles and Practice, 3rd Edition, Addison-Wesley, 2014.
- Chapter 15