Computer Graphics
Projections


Transformation Pipeline
- Split complex transformation from 3D to 2D into a sequence of simpler transformations.
- We discussed model transformations before
- Now we discuss view, projection, and viewport transformations

Transformation Pipeline
- View Transformation
- setup extrinsic camera parameters: position and orientation
- Projection Transformation
- setup intrinsic camera parameters: opening angle and depth range
- Viewport Transformation
- setup image parameters/resolution: width and height
Transformation Pipeline
- Model coordinates
- local coordinate system for each model
- World coordinates
- one global coordinate system
- Camera / eye coordinates
- world transformed to standard camera
 model
model 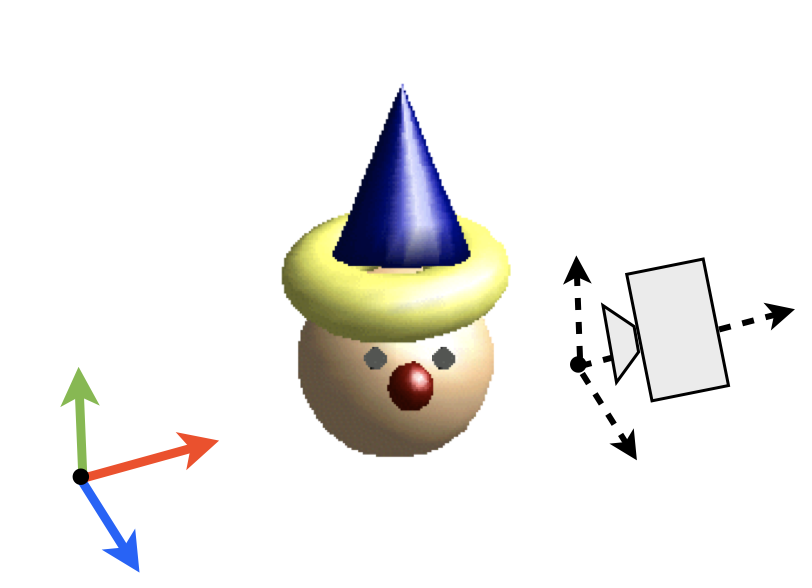 world
world  camera
camera
Transformation Pipeline
- Model coordinates
- local coordinate system for each model
- World coordinates
- one global coordinate system
- Camera / eye coordinates
- world transformed to standard camera
- Normalized device coordinates
- viewing volume mapped to [-1,1]3
- Window coordinates
- from [-1,1]3 to [-1,1]2 to pixel coordinates
View Transformation
- Specify extrinsic camera parameters
- Camera/eye location \(\vec{e}\)
- Viewing direction \(\vec{v}\)
- Up direction \(\vec{u}\)
- Right direction \(\vec{r}\)
- Assume \(\vec{v}\), \(\vec{u}\), \(\vec{r}\) are orthonormal
- Transform scene to standard camera
- Camera/eye location \((0,0,0)\)
- Viewing direction \((0,0,-1)\)
- Up direction \((0,1,0)\)
- Right direction \((1,0,0)\)
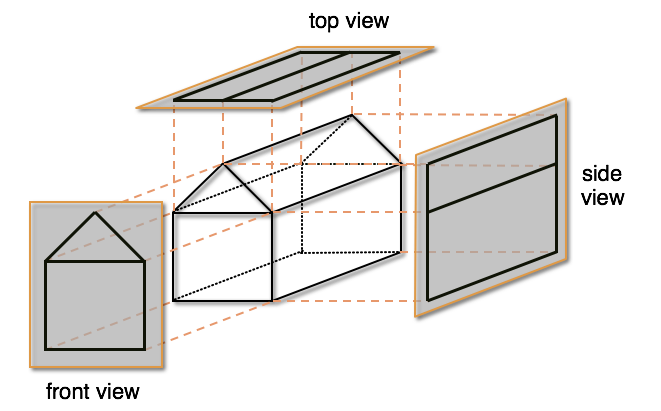
Classification of Projections

Parallel vs. Perspective Projection
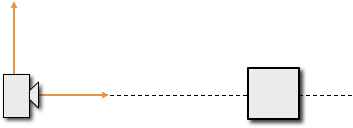
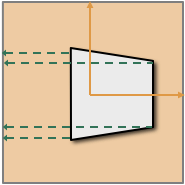
Generic Orthographic Projection
- Standard camera setup
- located at origin
- looking down negative z-axis
- Orthogonal projection onto xy-plane
- xy-coordinates do not change
- remove z-coordinate
\[ \matrix{ 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 } \]
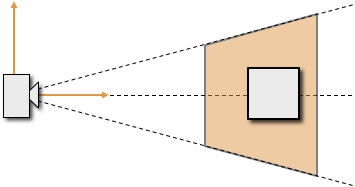
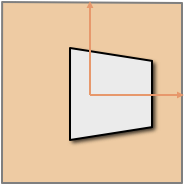
Generic Perspective Projection
- Standard projection
- Center of projection: \((0,0,0)\)
- Image plane at \(z=-d\)

\[ \vector{x\\y\\z} \;\mapsto\; \vector{x \cdot \frac{-d}{z} \\ y \cdot \frac{-d}{z} \\ -d} \quad\stackrel{?}{\longleftrightarrow}\quad \matrix{ ? & ? & ? & ? \\ ? & ? & ? & ? \\ ? & ? & ? & ? \\ ? & ? & ? & ? } \cdot \vector{x\\y\\z\\1} \]
Do not put \(z\) in the matrix!
Homogeneous Coordinates
- Use homogeneous coordinates \((x,y,z,w)\)!
- Vectors are represented by \(\transpose{(x,y,z,0)}\)
- Points are represented by \(\transpose{(wx,wy,wz,w)}\) for any \(w \neq 0\)
- Divide a point \(\transpose{(wx,wy,wz,w)}\) by \(w\) to get its canonical representation \(\transpose{(x,y,z,1)}\) (“homogenization”)
- Geometric interpretation
- Points: lines through origin
- Vectors: points at infinity

Generic Perspective Projection
- Standard projection
- Center of projection: \((0,0,0)\)
- Image plane at \(z=-d\)
\[ \vector{x\\y\\z} \;\mapsto\; \vector{x \cdot \frac{-d}{z} \\ y \cdot \frac{-d}{z} \\ -d} \quad\longleftrightarrow\quad \matrix{ 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & -1/d & 0 } \cdot \vector{x\\y\\z\\1} \;=\; \vector{x\\y\\z\\-z/d} \;\cong\; \vector{x \frac{-d}{z} \\ y \frac{-d}{z} \\ -d\\ 1} \]
OpenGL Perspective Projection
- Specify viewing volume by
- near and far
- left and right (or opening angle in x)
- bottom and top (or opening angle in y)
- Transform this frustum to unit cube [-1,1]3
- so-called frustum mapping
- Then perform parallel projection onto xy-plane and viewport transformation
Frustum Mapping
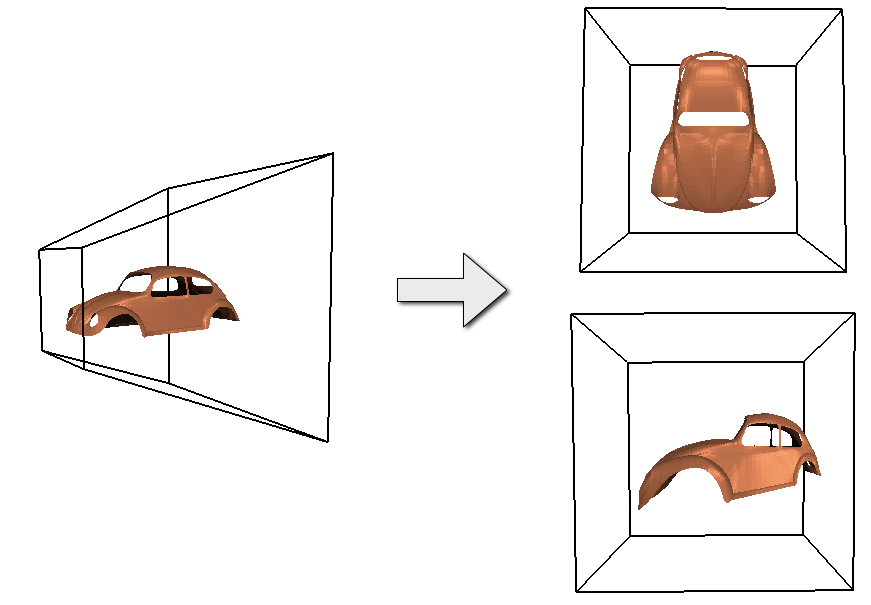
Frustum Mapping
How to transform \((x,y,z)\)?
\[ \begin{eqnarray*} x &\mapsto& \left( x \frac{n}{-z} - \frac{l+r}{2} \right) \cdot \frac{2}{r-l} \\[2mm] y &\mapsto& \left( y \frac{n}{-z} - \frac{b+t}{2} \right) \cdot \frac{2}{t-b} \end{eqnarray*} \]
Matrix representation:
\[ \matrix{ \frac{2n}{r-l} & 0 & \frac{l+r}{r-l} & 0 \\ 0 & \frac{2n}{t-b} & \frac{b+t}{t-b} & 0 \\ ? & ? & ? & 0 \\ 0 & 0 & -1 & 0 } \]
Frustum Mapping
How to transform \((x,y,z)\)?
\[ \begin{eqnarray*} z &\mapsto& \frac{a \cdot z + b}{-z} \end{eqnarray*} \]
such that
\[-n \mapsto -1 \;,\quad -f \mapsto +1\]
This leads to
\[ a = -\frac{n+f}{f-n} \;,\quad b = -\frac{2nf}{f-n} \]
Matrix representation:
\[ \matrix{ \frac{2n}{r-l} & 0 & \frac{l+r}{r-l} & 0 \\ 0 & \frac{2n}{t-b} & \frac{b+t}{t-b} & 0 \\ 0 & 0 & -\frac{n+f}{f-n} & -\frac{2nf}{f-n} \\ 0 & 0 & -1 & 0 } \]
Frustum Mapping
Check frustum corners, e.g.:
\[ \begin{eqnarray*} \transpose{(l,b,-n)} &\mapsto& \transpose{(-1,-1,-1)} \\[2mm] \transpose{(r,t,-n)} &\mapsto& \transpose{(+1,+1,-1)} \\[2mm] \transpose{(l\frac{f}{n},b\frac{f}{n},-f)} &\mapsto& \transpose{(-1,-1,+1)} \\[2mm] \transpose{(r\frac{f}{n},t\frac{f}{n},-f)} &\mapsto& \transpose{(+1,+1,+1)} \\[2mm] \end{eqnarray*} \]
Matrix representation:
\[ \matrix{ \frac{2n}{r-l} & 0 & \frac{l+r}{r-l} & 0 \\ 0 & \frac{2n}{t-b} & \frac{b+t}{t-b} & 0 \\ 0 & 0 & -\frac{n+f}{f-n} & -\frac{2nf}{f-n} \\ 0 & 0 & -1 & 0 } \]
Transformation Pipeline
- View Transformation
- setup extrinsic camera parameters: position and orientation
- Projection Transformation
- setup intrinsic camera parameters: opening angle and depth range
- Viewport Transformation
- setup image parameters/resolution: width and height
Literature
- Akenine-Möller, Haines, Hoffman: Real-Time Rendering, Taylor & Francis, 2008.
- Chapter 4
- Shreiner, Seller, Kessenich, Licea-Kane: OpenGL Programming Guide, 2013.
- Chapter 3

- Paul Bourke, University of Western Australia: http://paulbourke.net/stereographics/