Computer Graphics
2D Transformations


Rasterization Pipeline

Ray Tracing vs. Rasterization
- Ray Tracing
- Shoot rays from 2D pixels into 3D scene
- “backward rendering”
- needs ray intersections

- Rasterization
- Project 3D objects onto 2D image plane
- “forward rendering”
- needs transformations & projections

Which transformations do we need?
2D Transformations
 translation
translation  scaling
scaling
 rotation
rotation
2D Translation
- Translate object by \(t_x\) in \(x\) and \(t_y\) in \(y\) \[ \vector{x \\ y} \mapsto \vector{t_x + x \\ t_y + y} \]
2D Scaling
- Scale object by \(s_x\) in \(x\) and \(s_y\) in \(y\) (around origin!) \[ \vector{x \\ y} \mapsto \vector{s_x \cdot x \\ s_y \cdot y} \]
2D Rotation
- Rotate object by \(\theta\) degrees
(around origin!)
2D Rotation
- Rotate point \((x,y) = (r\cos\phi, r\sin\phi)\)
by \(\theta\) degrees around origin
\[ \begin{eqnarray*} \vector{x\\y} &\mapsto& \vector{r \cos\of{\phi+\theta} \\ r \sin\of{\phi+\theta}} \\[2mm] &=& \vector{r \cos\phi \cos\theta - r \sin\phi \sin\theta \\ r \cos\phi \sin\theta + r \sin\phi \cos\theta} \\[2mm] &=& \vector{\cos\theta \cdot x - \sin\theta \cdot y \\ \cos\theta \cdot y + \sin\theta \cdot x} \\[2mm] &=& \matrix{\cos\theta & -\sin\theta \\ \sin\theta & \cos\theta} \cdot \vector{x \\ y} \end{eqnarray*} \]

2D Rotation
- Rotate object by \(\theta\) degrees
(around origin!)
\[ \vector{x\\y} \mapsto \matrix{\cos\theta & -\sin\theta \\ \sin\theta & \cos\theta} \cdot \vector{x \\ y} \]
How to rotate/scale around object center?
- Translate center to origin
- Scale object
- Rotate object
- Translate center back

- This can get quite messy!
Matrix Representation
\[ \mat{S}\of{s_x, s_y} = \matrix{ s_x & 0 \\ 0 & s_y } \]
\[ \mat{R}\of{\theta} = \matrix{\cos\theta & -\sin\theta \\ \sin\theta & \cos\theta} \]
\[ \mat{T}\of{t_x, t_y} = \matrix{ ? & ? \\ ? & ?} \]
Which transformations can be written as matrices?
Linear vs. Affine Transformations
- Every linear transformation has to preserve the origin
- \(L(\vec{0}) = \mat{L} \cdot \vec{0} = \vec{0}\)
- Translation is not a linear mapping
- \(T(0,0) = (t_x, t_y)\)
- Translation is affine transformation
- affine mapping = linear mapping + translation
- \(\vector{x \\ y} \mapsto \matrix{a & b \\ c & d} \cdot \vector{x \\ y} + \vector{t_x \\ t_y} = \mat{L}\vec{x} + \vec{t}\)
Matrix Representation
scaling
\[ \matrix{ s_x & 0 & 0 \\ 0 & s_y & 0 \\ 0 & 0 & 1 } \]
rotation
\[ \matrix{\cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1} \]
translation
\[ \matrix{ 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1} \]
Columns of matrix are images of basis vectors!
Ordering of Matrix Multiplication
- First rotation, then translation

- First translation, then rotation

How to rotate/scale around object center?
- Translate center to origin
- Scale object
- Rotate object
- Translate center back
What is the matrix representation?
Matrix Representation?

Columns of matrix are images of basis vectors!
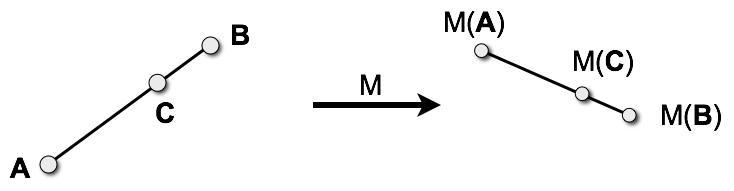
Transform straight edges
Any point \(\vec{C}\) on a line is an affine combination \[(1-\alpha)\vec{A} + \alpha\vec{B}\]
of its endpoints \(\vec{A}\) and \(\vec{B}\).Affine transformation \(\mat{M}\) preserves affine combinations \[ \mat{M}\of{(1-\alpha)\vec{A} + \alpha\vec{B}} \;=\; (1-\alpha)\mat{M}\of{\vec{A}} + \alpha\mat{M}\of{\vec{B}} \]
Literature
- Akenine-Möller, Haines, Hoffman: Real-Time Rendering, Taylor & Francis, 2008.
- Chapter 4
- Hughes et al.: Computer Graphics: Principles and Practice, 3rd Edition, Addison-Wesley, 2014.
- Chapter 10,11
- Shreiner, Seller, Kessenich, Licea-Kane: OpenGL Programming Guide, 2013.
- Chapter 3
